Everardo Shain Ruvalcaba
Wednesday, February 16, 2022
Tomato Harvesting Robot
Overview
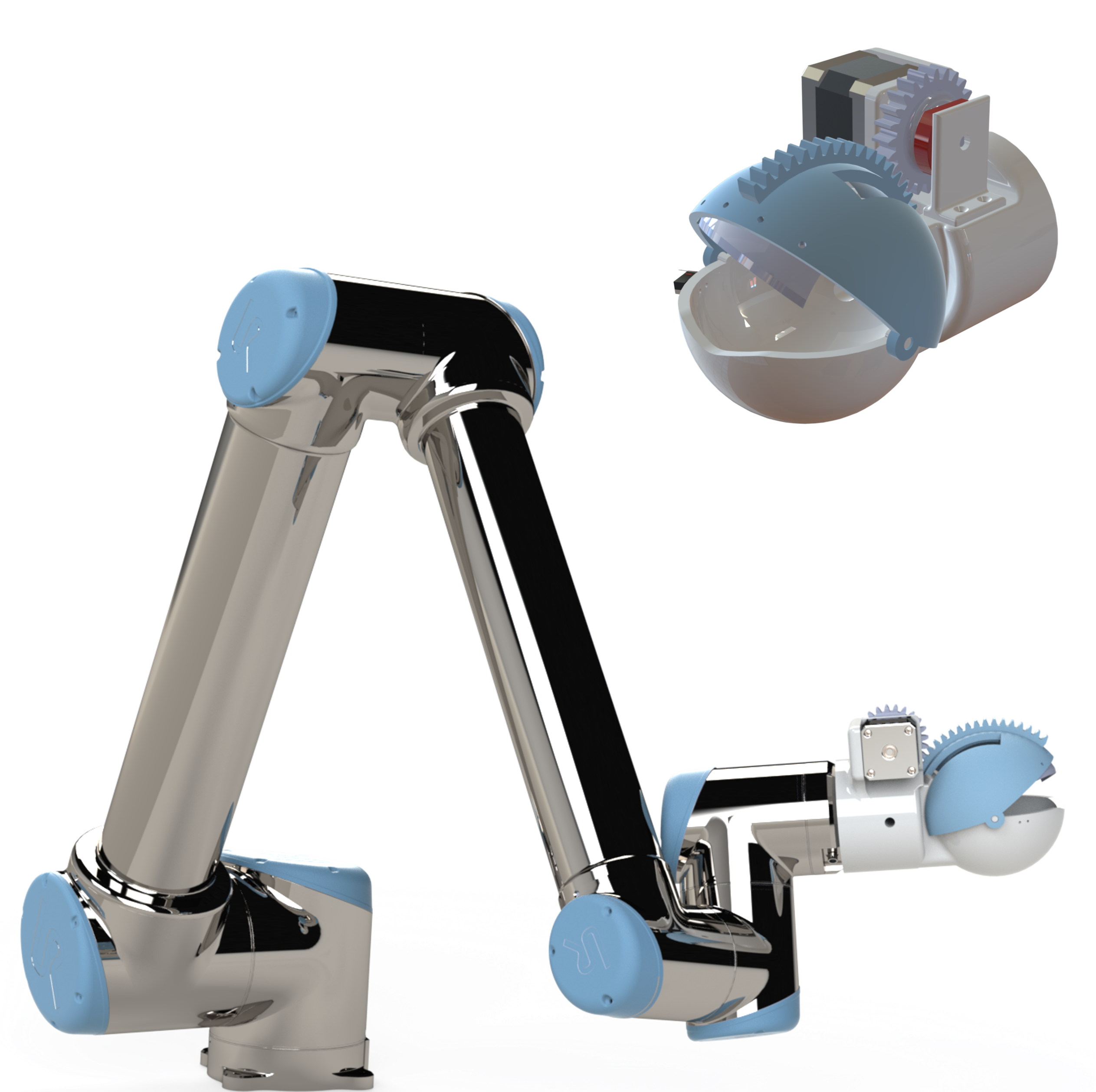
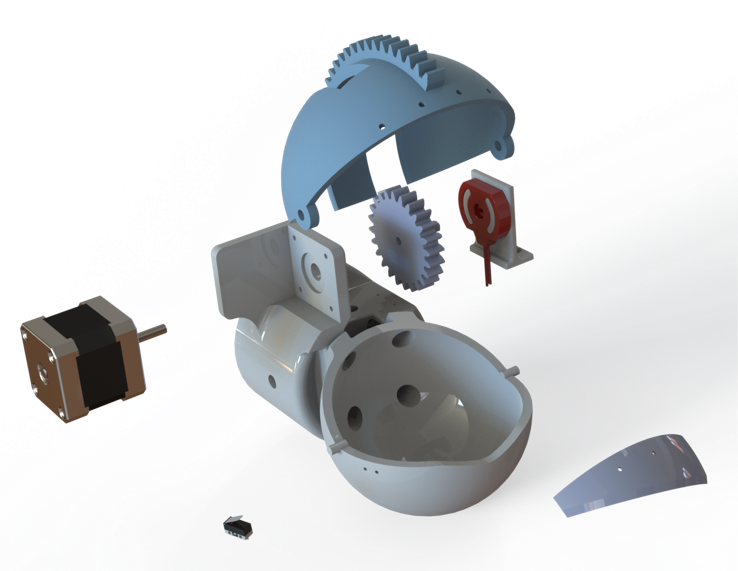
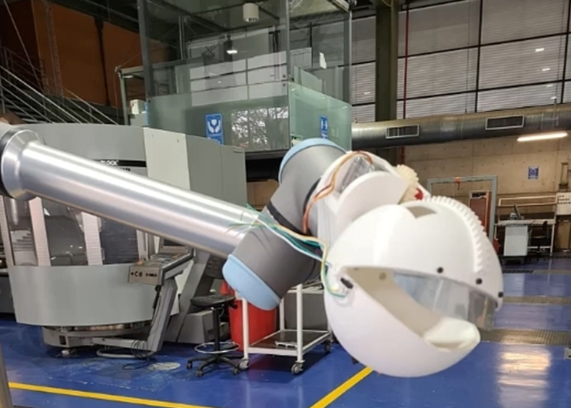
Project in collaboration with Mondragon Unibertsitatea, Tecnológico de Monterrey campuses Puebla and Queretaro. My team and I worked on the End-Effector Subsystem where we designed and built a 3D-printed prototype of a robot gripper capable of collecting tomatoes using as sensors and actuators a limit switch, a potentiometer and a stepper motor. I had the specific task of writing the code of the embedded system that controlled its movement using an Arduino UNO, and we also programmed an UR10e industrial robot to follow a certain trajectory, mounted the gripper and tested the whole system which successfully completed the tasks of collecting a tomato and placing it on a container.
I improved my collaborative skills by working in person with my 4 teammates and by also being in touch with all the other teams from different campuses on their progress.
Tools
Hardware
- Arduino UNO: microcontroller board.
- Potentiometer: position sensor (gripper closed or opened).
- Stepper motor: gear movement.
- UR10e: robotic arm integration.
- 3D printing: parts manufacturing
- Gears: motion transmission.
Software
- Arduino: programming language for embedded software development.
- Arduino IDE: software environment for writing and running Arduino code.
- PolyScope X: UR10e control.
- SolidWorks: 3D design.
Objectives
- Design a mechanical assembly to do the task of clamping and cutting the vegetable from the stem.
- Perform simulations of maximum applied force to detect weak points in parts and assembly.
- Carry out the electrical design including sensors and actuators in the end-effector.
- Manufacture the prototype using additive manufacturing.
- Design control for the end-effector.
Video
Gallery