Everardo Shain Ruvalcaba
Tuesday, December 3, 2024
Next Best View | Master's Thesis
Overview
This study was made with the purpose of understanding the impact of the objective function and optimization methods on the Next Best View problem, which consists in finding the next position that the sensor or camera needs to take to scan an object or scenery in its totality.
A simulated 5-Degree-of-Freedom mobile robot with a mounted simulated range sensor was used on a Virtual Reality Modeling Language environment, and the space discretization was made using a voxel map. For the objective function, two main factors were included: an area factor to make sure that the image taken by the sensor provides the best possible information, and a motion factor made up of distance and energy sub-factors to reduce the resources used by the robot, making multiple experiments on a laboratory scene to determine their best arrangement on the final objective function. Global optimization tasks such as a backstepping technique to escape local minima and a dynamic change in the objective function were implemented. The retrievement of the scene was made on an iterative process, with each iteration needing an optimization process for which three different methods were tested: Nelder-Mead, an Evolution Strategy, and Simulated Annealing.
A set of experiments comparing the three methods in computational time and retrievement efficiency were made on three different environments with increasing difficulty to test their repeatability, with them being a laboratory model, a room with a cube and a pyramid inside it, and a study room with multiple furniture and windows.
Tools
- C: programming language.
- GCC 4.2.4: compiler.
- Ubuntu 8.04: Linux operating system.
- VRML: triangular mesh from input model.
- LaTeX: thesis technical writing.
Objectives
- Build a principal area factor aiming at retrieving the model.
- Formulate a distance factor to reduce the total distance covered by the robot.
- Add an energy factor focused on optimizing the movements of the sensor.
- Consider a quality factor to improve the voxels mean quality.
- Find the best arrangement of this factors into a single objective function.
- Provide an algorithm that finds an optimal solution and minimizes computational time.
Iterative Process
Initial Steps The following steps are executed only once.
- Start: Begin with an empty voxel map.
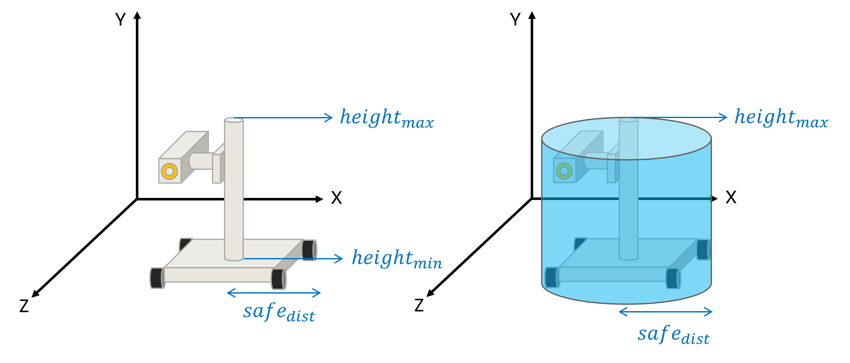
- Initialization: Initialize the sensor at a starting position inside the scene.
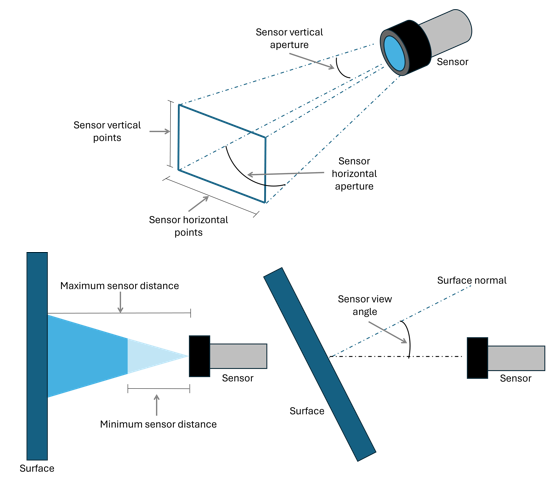
- First Scan: Take an initial range image and update the voxel map with this first set of data.
Main Iteration Loop (Global optimization) The following steps are repeated until a stopping condition is met.
- Find Next View (Local optimization): Run an optimization process to determine the Next-Best-View for scanning.
- Scan and Update: Move to the calculated Next-Best-View, take a new range image, and update the voxel map.
- Check Stopping Criteria: Evaluate if the process should terminate when the scene is considered complete or a predefined limit for the number of views has been reached.
- If NO, repeat the loop by returning to step 4.
- If YES, exit the loop and proceed to the final step.
- Finish: The process concludes, resulting in the final voxel map.
Objective Function Factors
- Area factor: aims at retrieving the model. Has a dynamic change of function during the simulation.
- Motion factor: reduce the robot´s resource consumption:
- Distance factor: reduce the total distance covered by the robot.
- Energy factor: aims at optimizing the movements of the sensor.
- Quality factor: improve the voxels mean quality. After conducting several experiments, it was decided that the objective function should not include a quality factor.
Optimization Algorithms
- Nelder-Mead algorithm:
- Conventional method.
- Local search without memory.
- (1+1)-ES:
- Metaheuristic.
- Random strategy.
- Simulated annealing:
- Metaheuristic.
- Probabilistic method.
Results
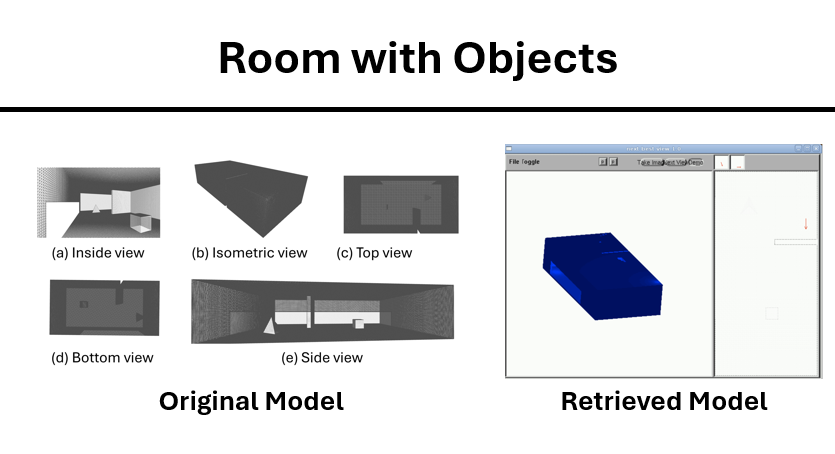
Room with objects
| Method | Accumulated distance (m) | Accumulated energy | Retrievement (%) | Time (s) |
|---|---|---|---|---|
| Nelder-Mead | 98.435 | 5.230 | 83.47 | 131.053 |
| (1+1)-ES | 119.858 | 6.013 | 84.03 | 34.733 |
| Simulated annealing | 146.451 | 6.218 | 83.54 | 35.720 |
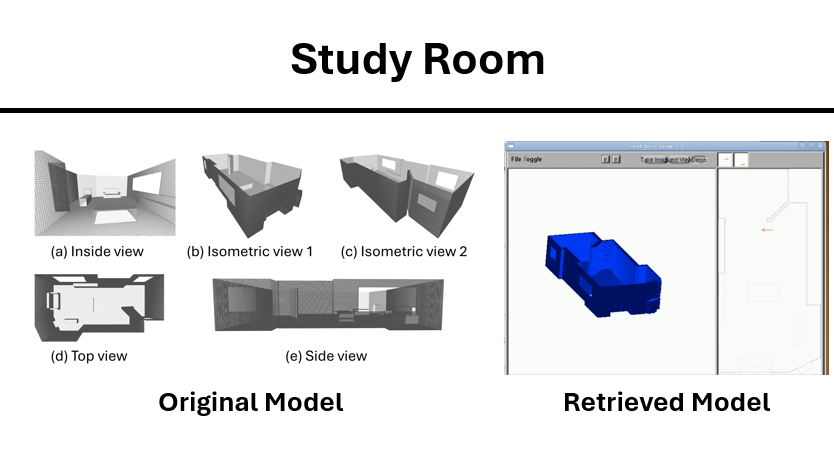
Study room
| Method | Accumulated distance (m) | Accumulated energy | Retrievement (%) | Time (s) |
|---|---|---|---|---|
| Nelder-Mead | 316.973 | 21.902 | 92.41 | 183.333 |
| (1+1)-ES | 283.049 | 23.260 | 89.17 | 25.027 |
| Simulated annealing | 287.862 | 28.270 | 90.26 | 22.813 |
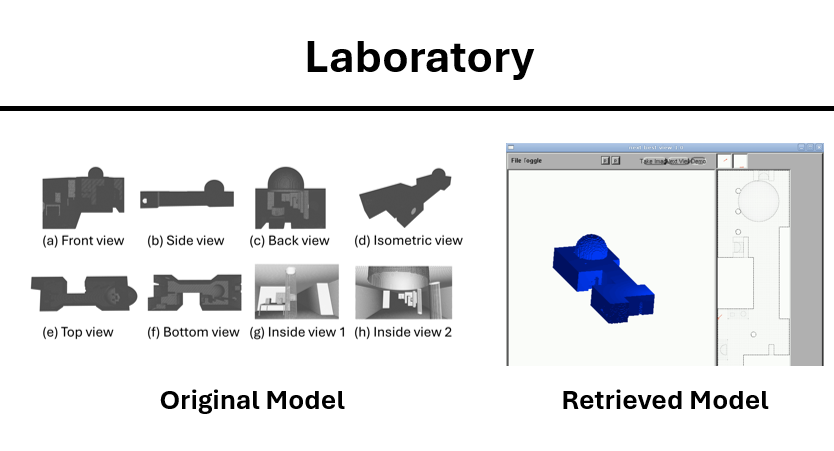
Laboratory
| Method | Accumulated distance (m) | Accumulated energy | Retrievement (%) | Time (s) |
|---|---|---|---|---|
| Nelder-Mead | 327.351 | 19.118 | 89.51 | 297.067 |
| (1+1)-ES | 272.077 | 16.544 | 87.78 | 120.493 |
| Simulated annealing | 317.389 | 22.772 | 87.69 | 176.307 |
Publications
Thesis: E. Shain Ruvalcaba, “View planning for three-dimensional environment reconstruction using the Next Best View method”, 2024.
DOI: 10.60473/ritec.31.
Defense unanimously approved by a three-person committee.Journal article: E. Shain-Ruvalcaba, E. López-Damian, “Tuning and Comparison of Optimization Algorithms for the Next Best View Problematic,” in IEEE Access, vol. 12, pp. 185567–185585, 2024.
DOI: 10.1109/ACCESS.2024.3513154.
Gallery