
Hi, I am Everardo
- I am a Mechatronics Engineer
- I work on industrial automation, robotics, data science and more
- I have been involved in research projects
- I enjoy automating processes
I’m a Mechatronics Engineer focused on software for robotics, industrial automation, and data science. I enjoy solving problems through logic, programming, and algorithms. I’m a quick learner with strong research skills strengthened by an MS in Engineering, having published in a Q1 journal.
This portfolio is intended to showcase my skills and experience through an extensive list with most of my projects.
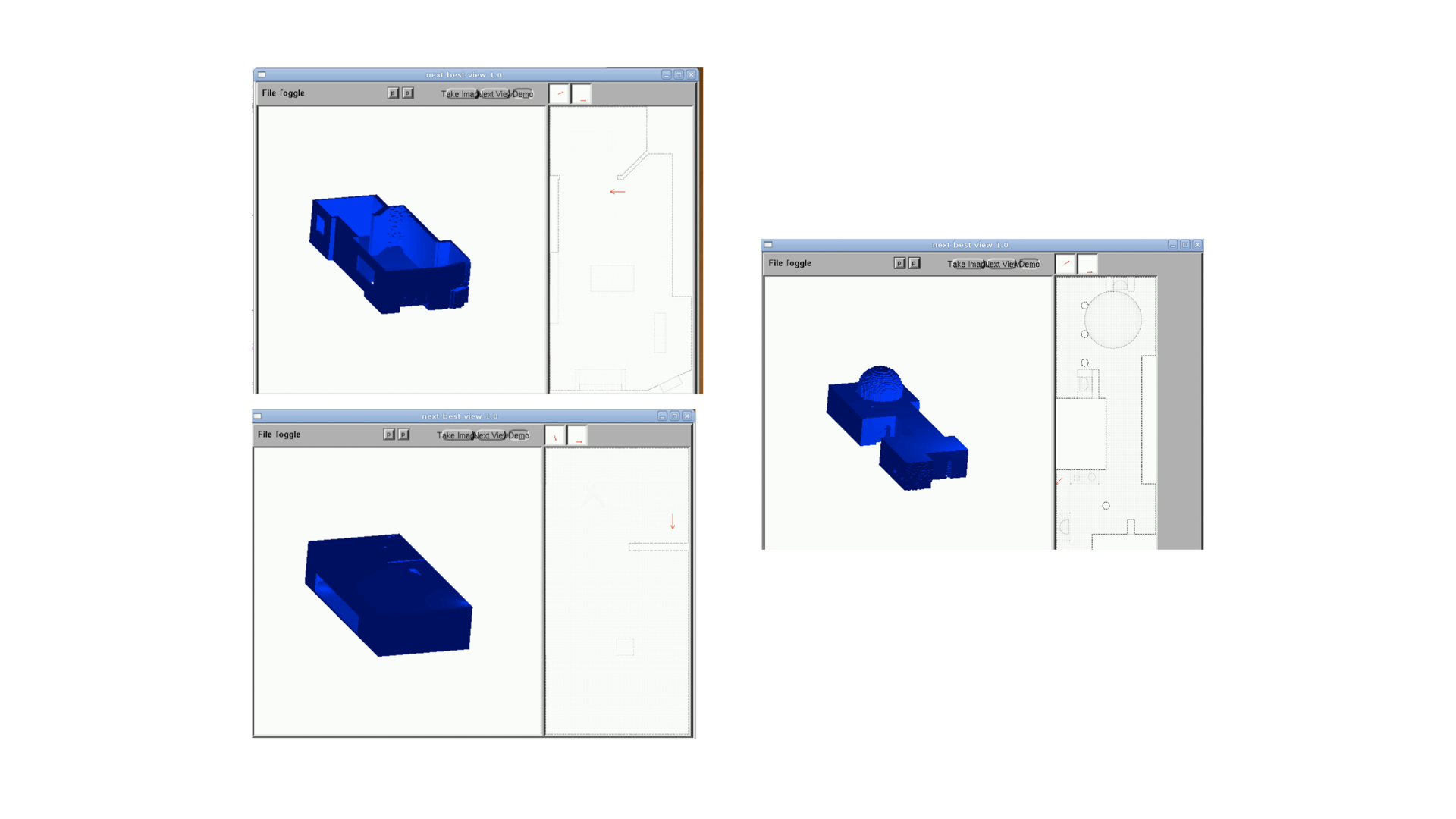
Implemented three optimization algorithms in C for sensor position prediction in 3D environment reconstruction, retrieving at least 83% of three tested environments in under 200 seconds.
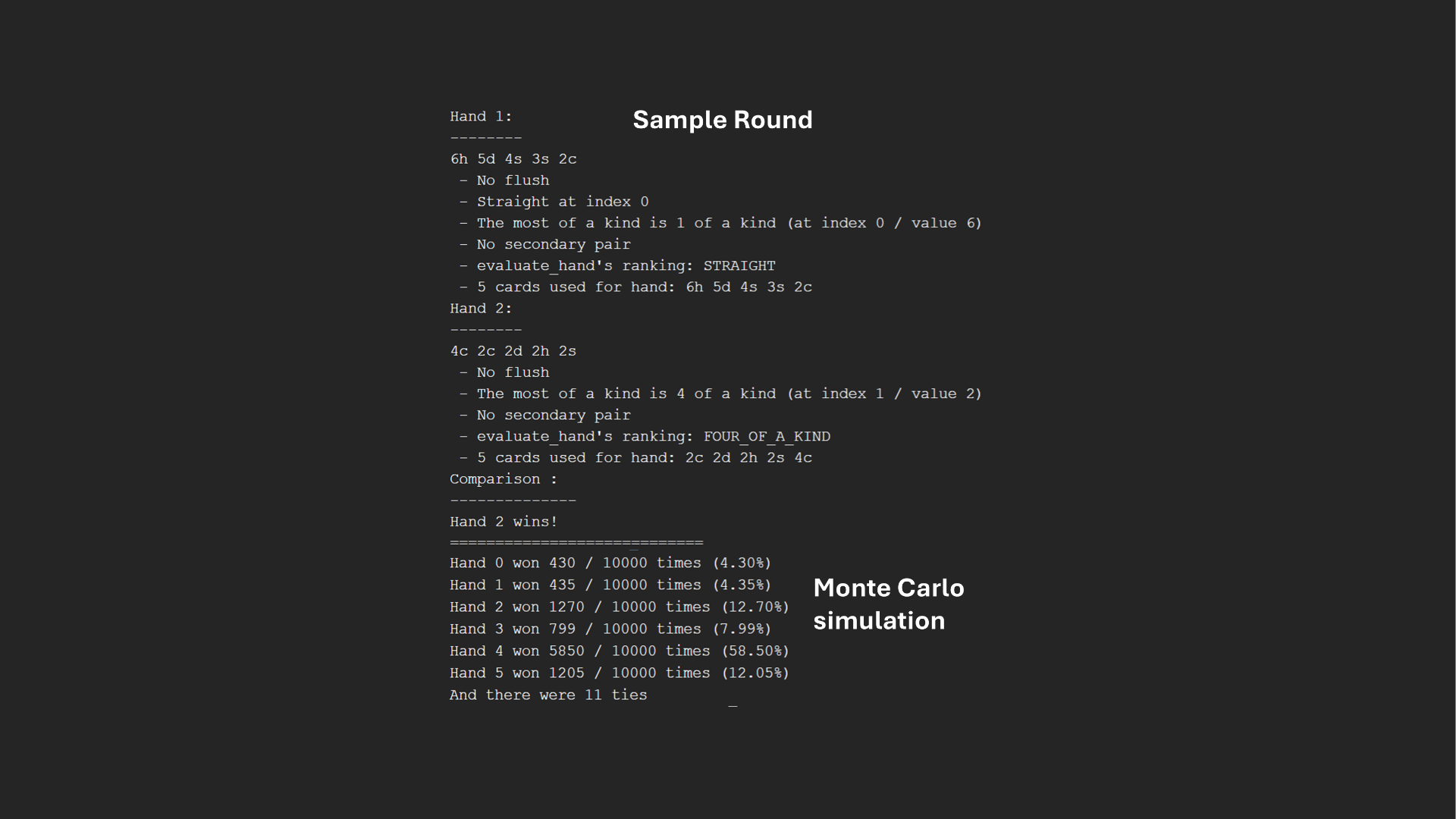
Programmed with C a poker simulator for hand evaluation and winning prediction running a Monte Carlo simulation, using arrays, pointers, debugging and memory management, plus writing test cases.
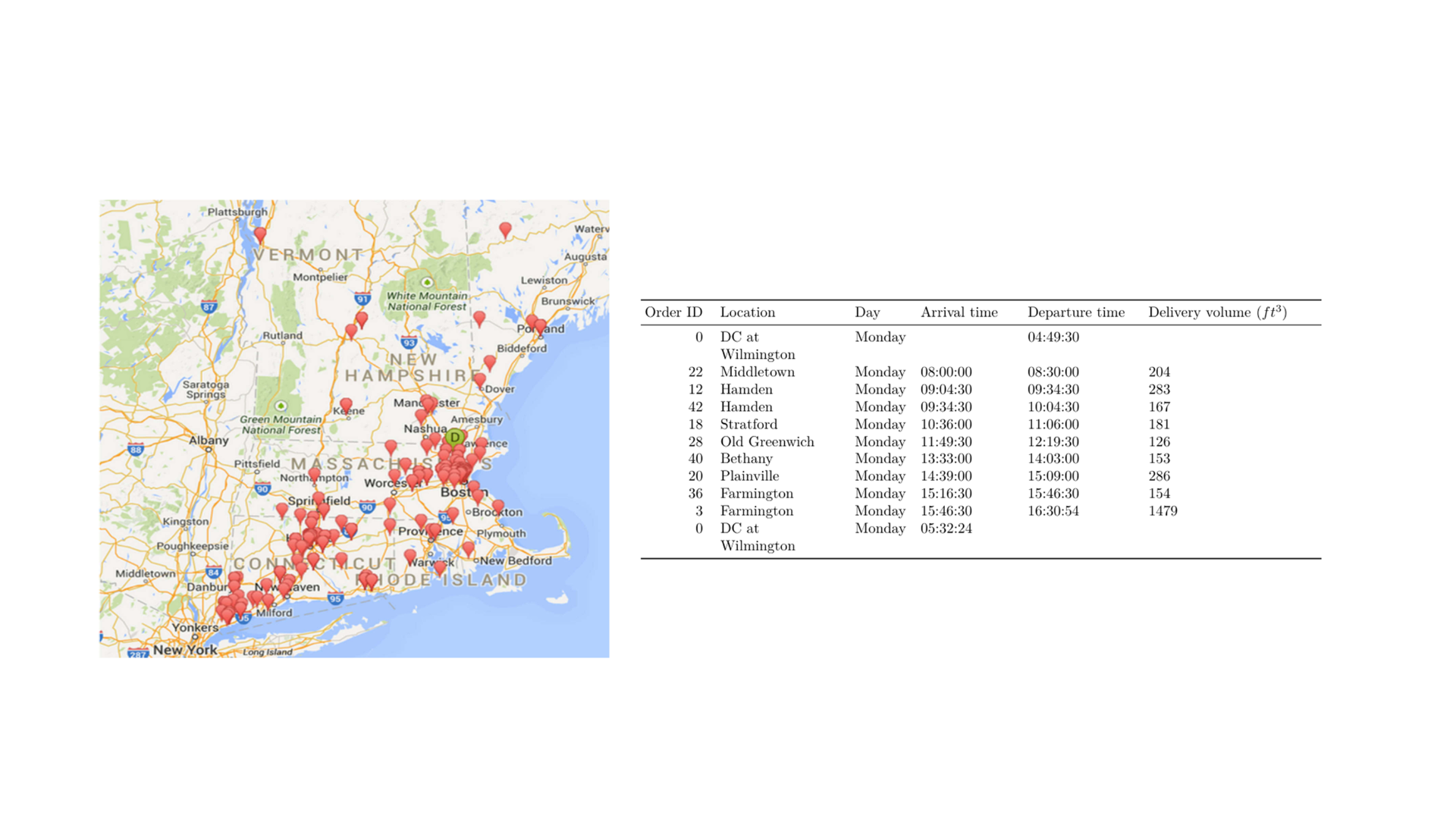
Optimized by 15.5% a vehicle routing problem of 45 deliveries on GAMS, and the total 261 deliveries by 12.1% with the Clarke and Wright Savings Algorithm coded on R.
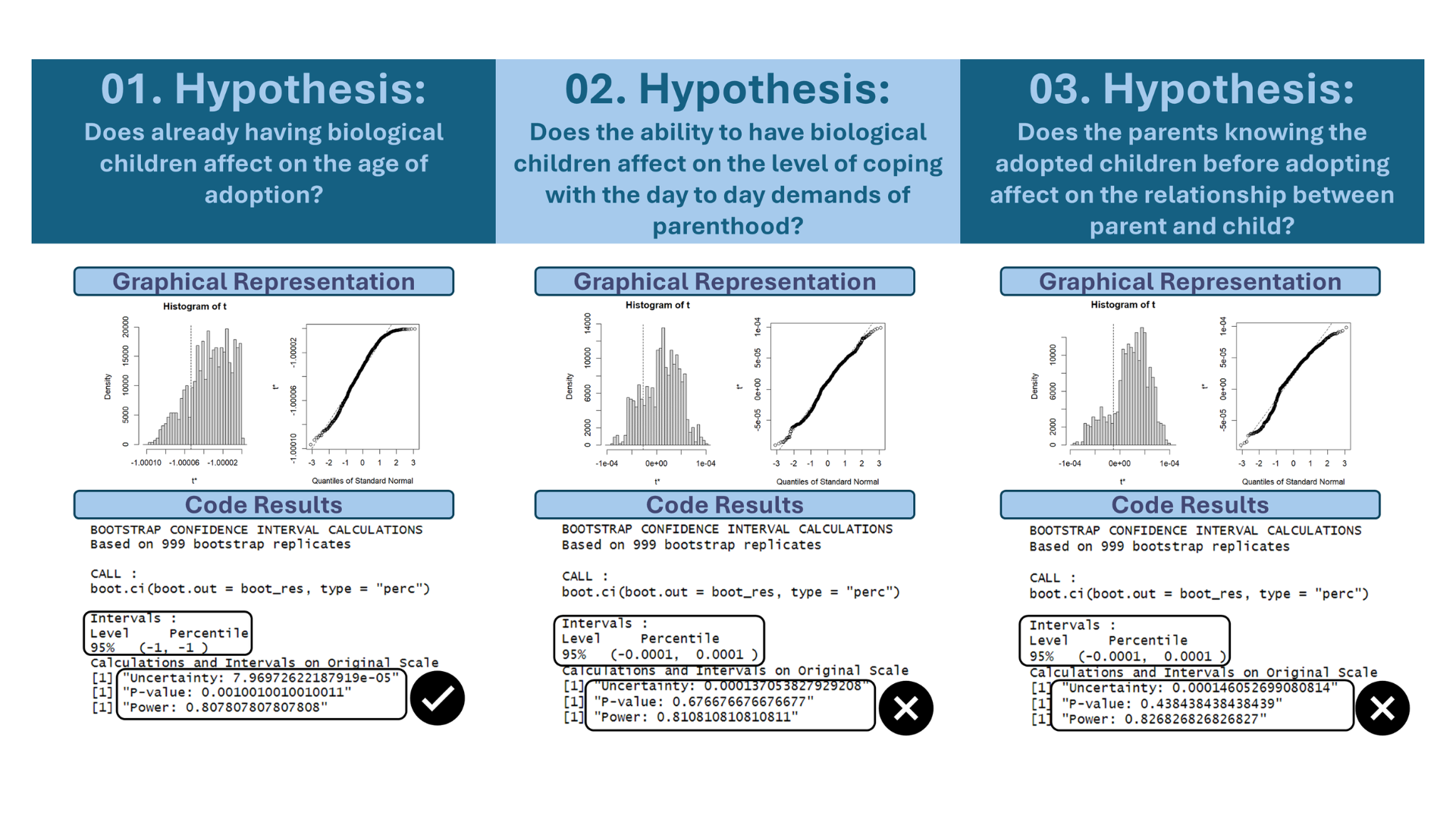
Formulated and tested 3 children adoption hypotheses with the Mann-Whitney U test and bootstrapping using R language, with the tests achieving good power of at least 80%.
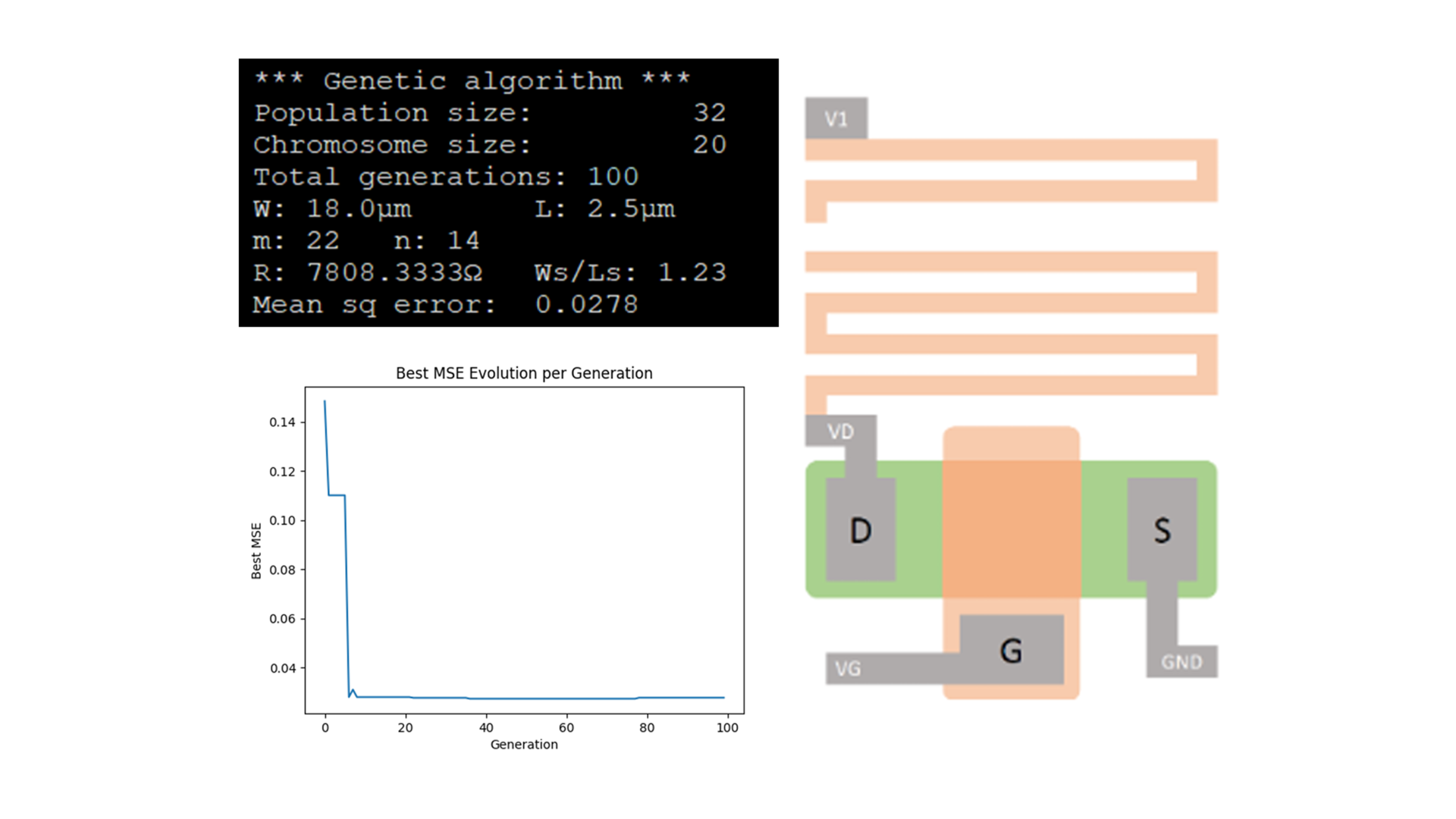
Implemented a genetic algorithm on Python that optimized 4 parameters of an integrated circuit, minimizing the MSE down to 2.78% using 100 generations of 32 chromosomes with 20 genes.
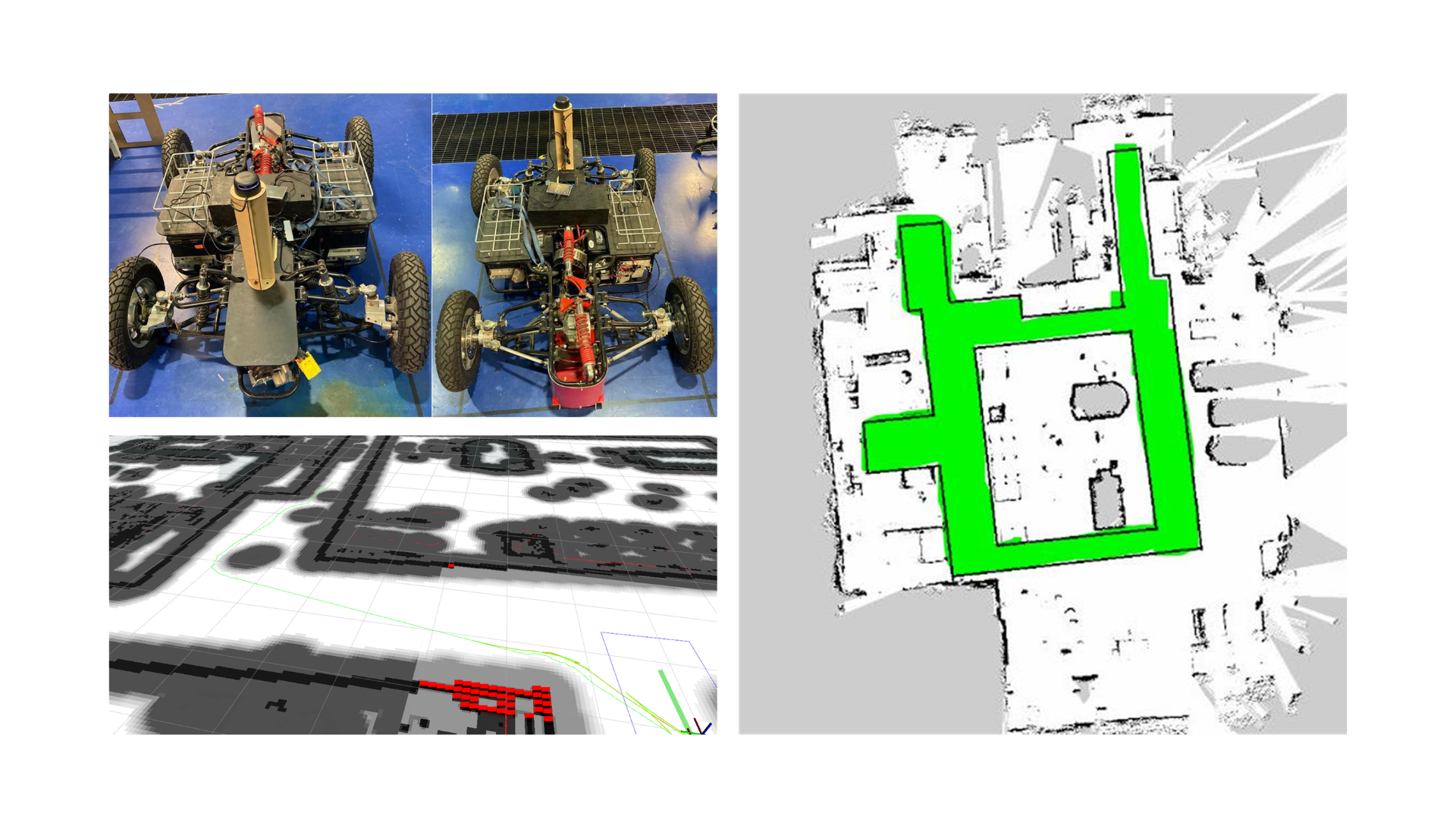
Contributed to AGV navigation programming with SLAM-based laboratory mapping using a RPLIDAR sensor, Arduino, and ROS on an NVIDIA Jetson Xavier, successfully avoiding collisions.
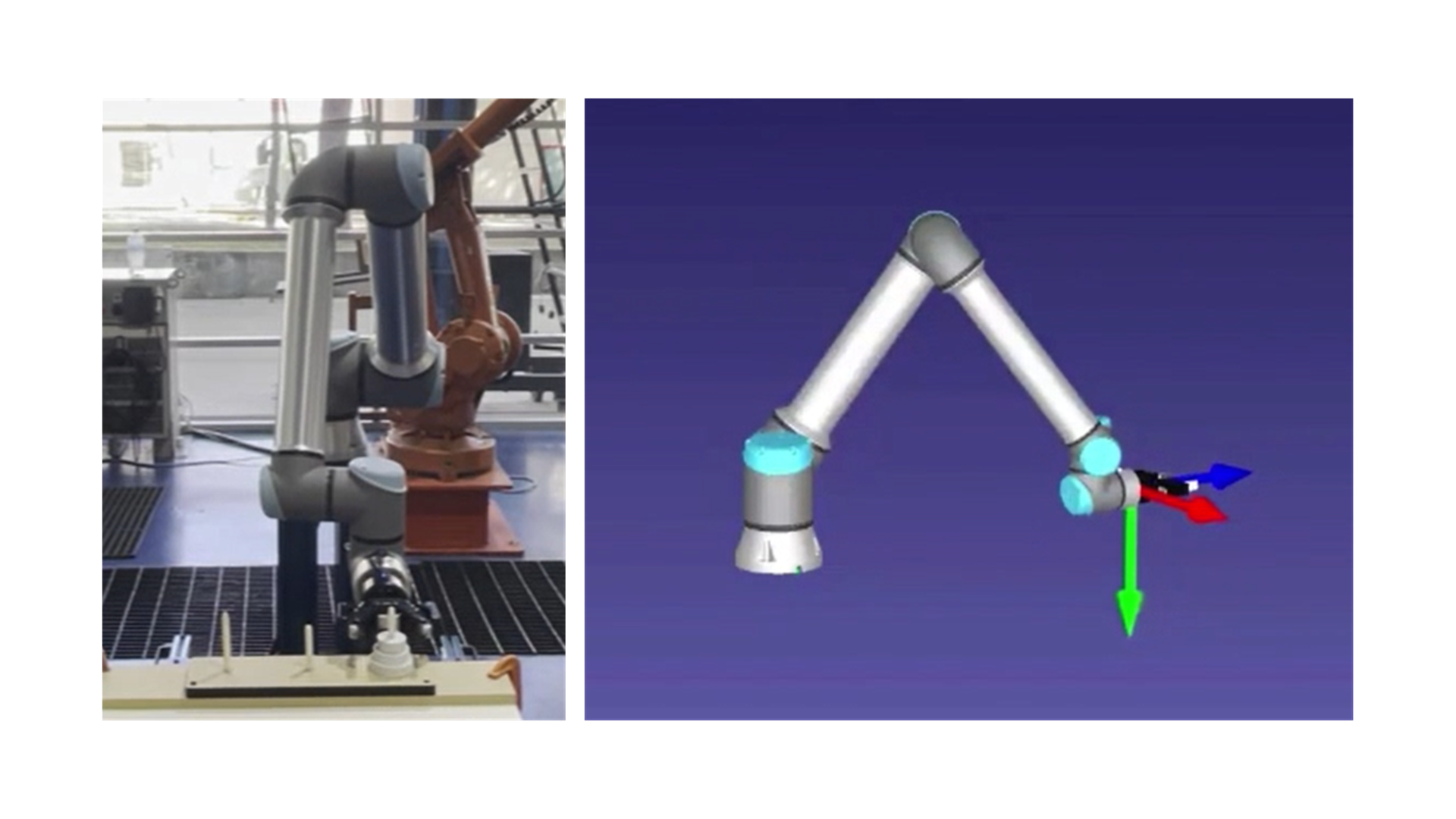
Coded the inverse kinematics of a UR10e robot using Python and tested it by solving a Tower of Hanoi with 7 movements where the relative error of the robot pose was under 0.1%.
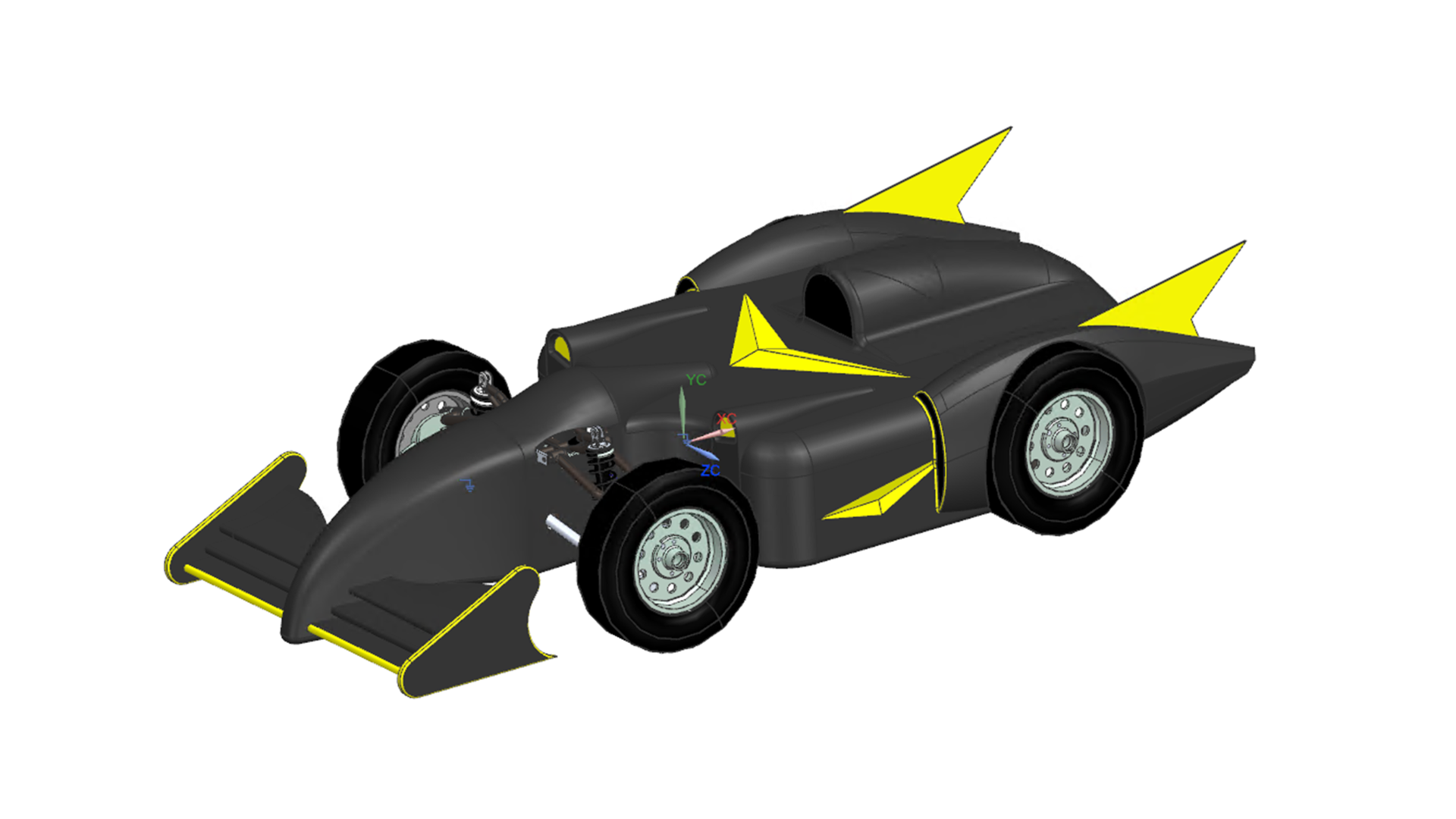
Designed the exterior of a car using Siemens NX, applying surface modeling techniques and creating brackets for a complete assembly with an existing chassis model.
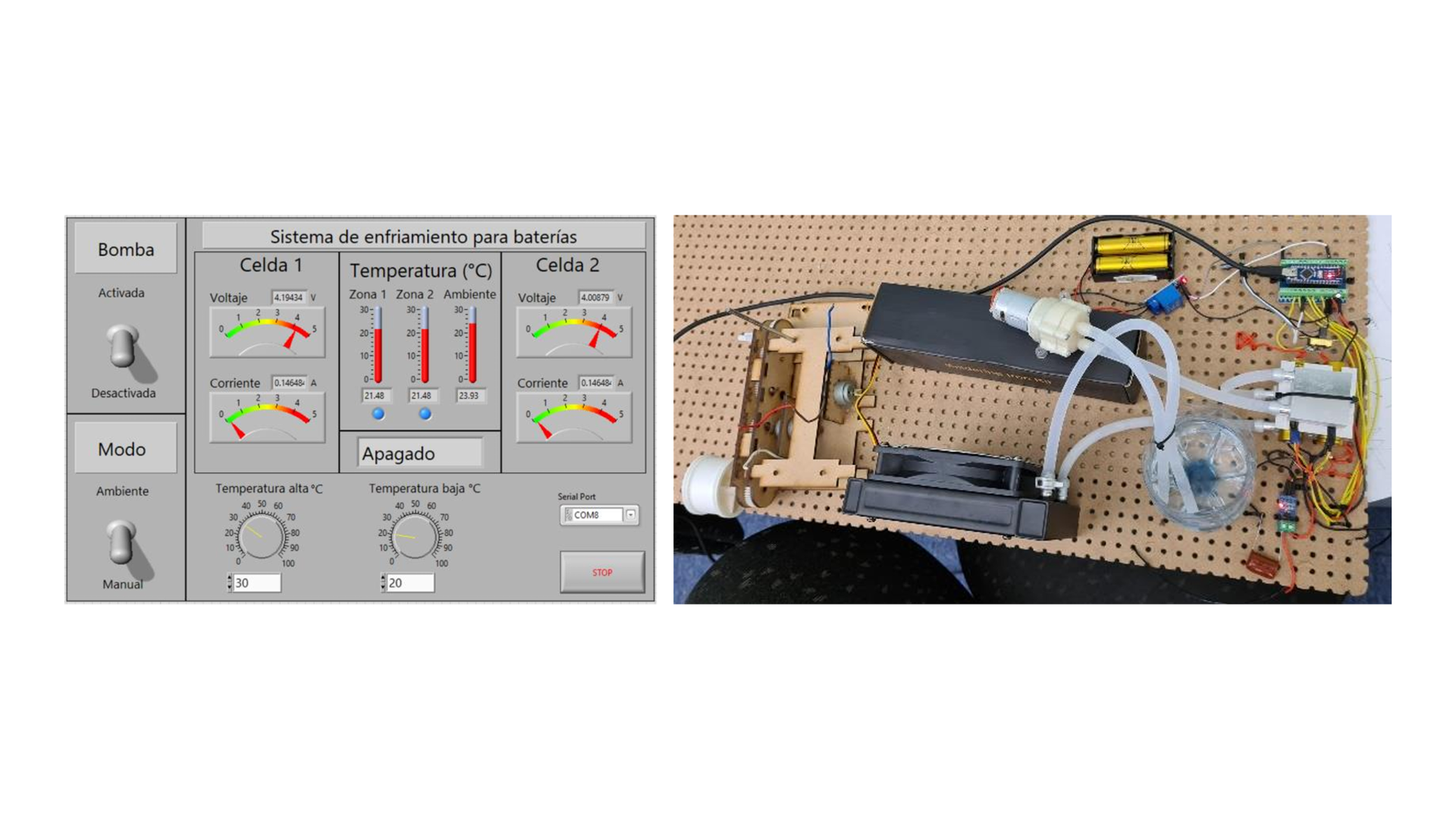
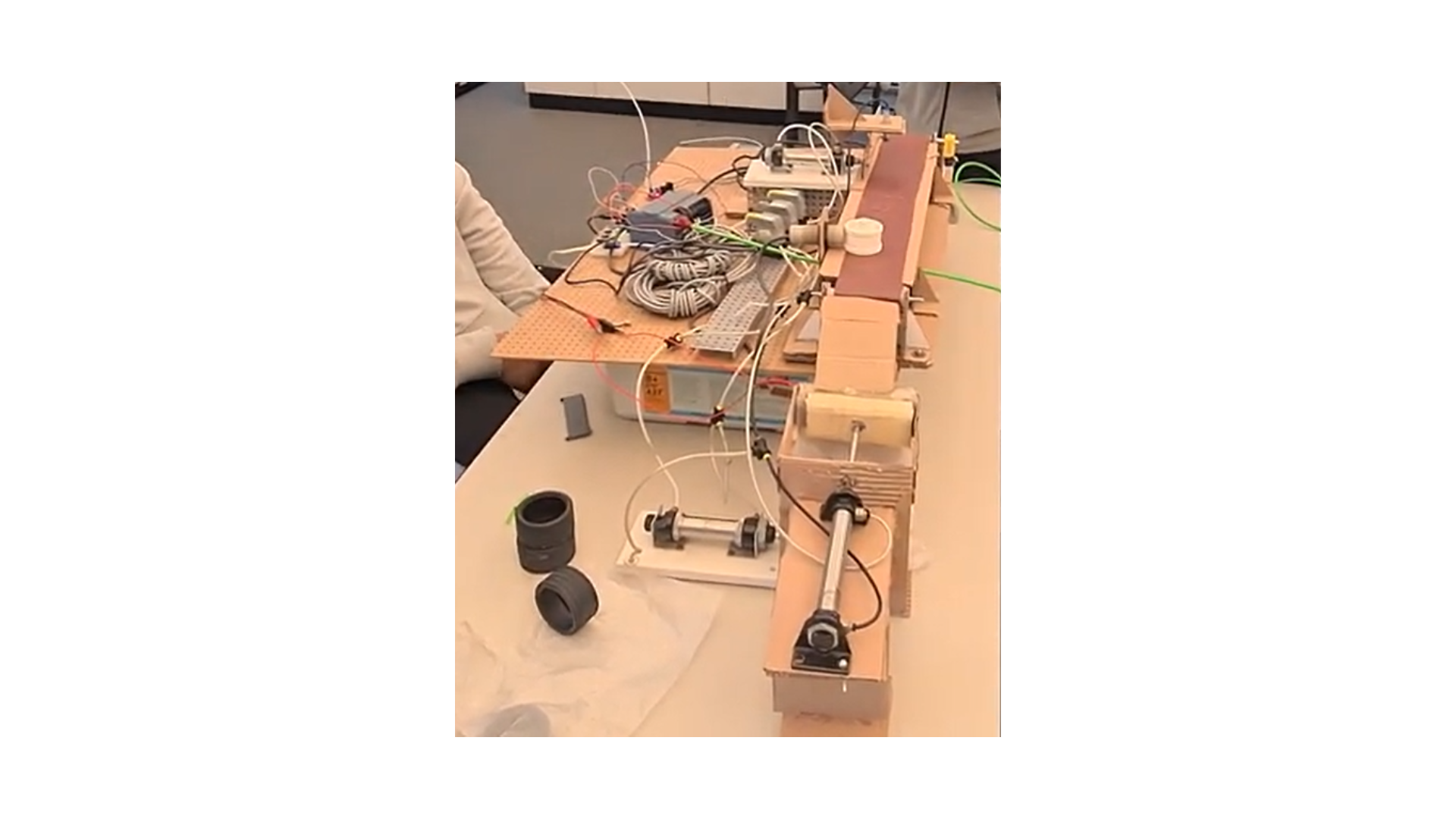
Programmed a battery cooling system with an Arduino Nano and a LabVIEW HMI to define the desired temperature limits plus visualize the current, voltage and temperature.

Programmed a laser harp using Arduino IDE on an ESP32, capable of reproducing 8 different 8-bit musical notes on an EK1236 amplifier using multiple KY-008 sensors as laser strings.

Designed on Siemens NX a step ladder assembly including screws, rubber feet, rails and steps. Parametric design was used for its dimensions and shape (vertical, W shaped, V shaped, closed).

Programmed on Arduino a Mini Sumo robot for international competition Robomatrix 2022 as a member of Robociety student association, successfully beating an opponent without falling from the ring.

Designed on Siemens NX a bicycle assembly including wheels, pedals, seat, sprockets, handle and frame. Parametric design was used for its dimensions and by giving the user the option to include a basket.

Programmed on Arduino and MATLAB the control system of a laser turret that successfully tracked a red circle using computer vision and computerized control.
Programmed a conveyor belt using ladder on a PLC with TIA Portal, fulfilling the requirements of filling 5 bags with 5 items each while rejecting undesired objects, plus sealing each bag with heat.

Contributed on the project design of an electric scooter where we made a QFD, flow diagram, morphologic analysis, Pugh chart, CAD design, FEA, circuit design, programming and blueprints.
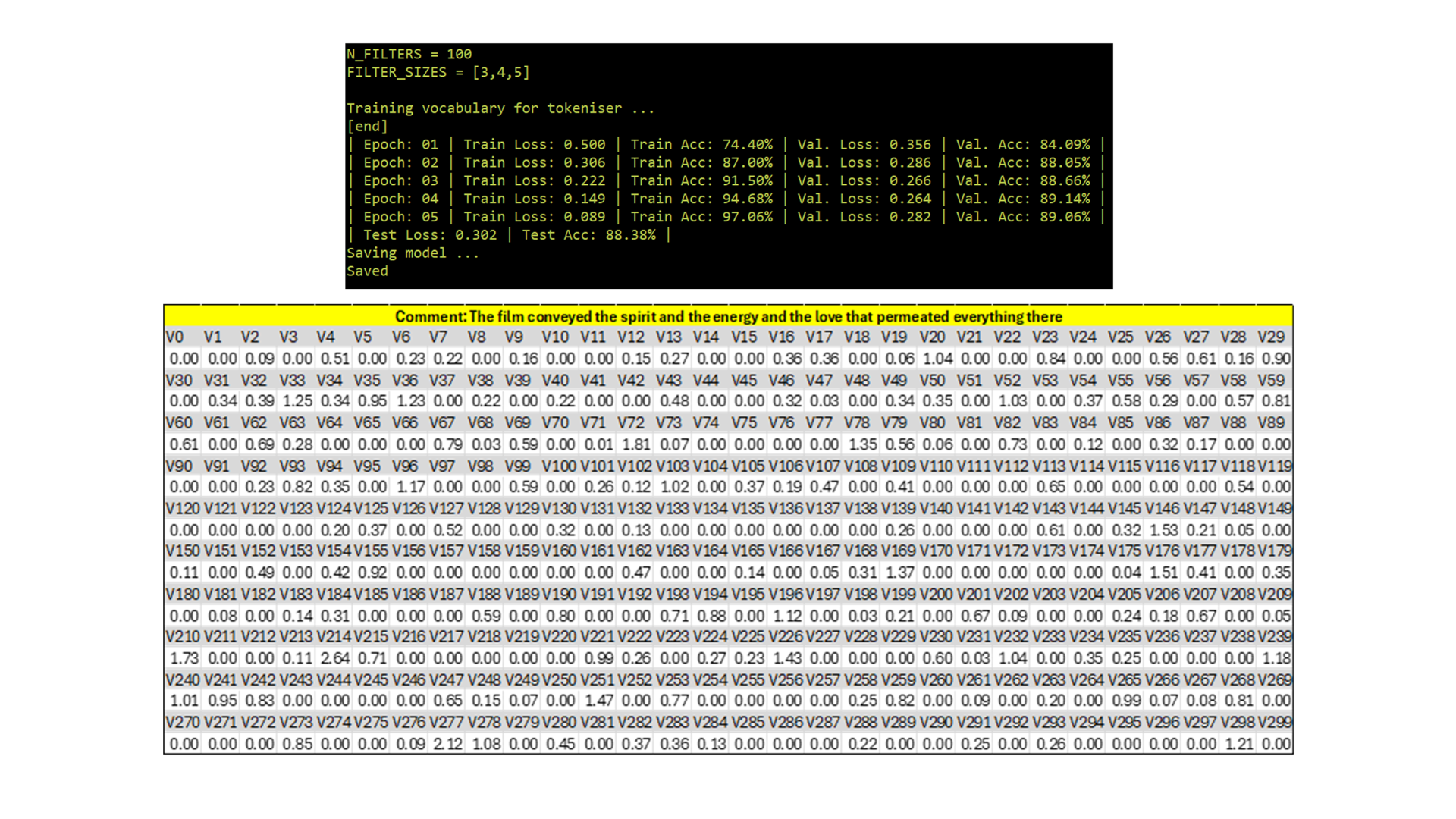
Contributed to a sentiment analysis pipeline for IMDB reviews in Python, using a CNN for 300-dimensional feature embeddings, achieving a test loss of 0.302 and a test accuracy of 88.38%.
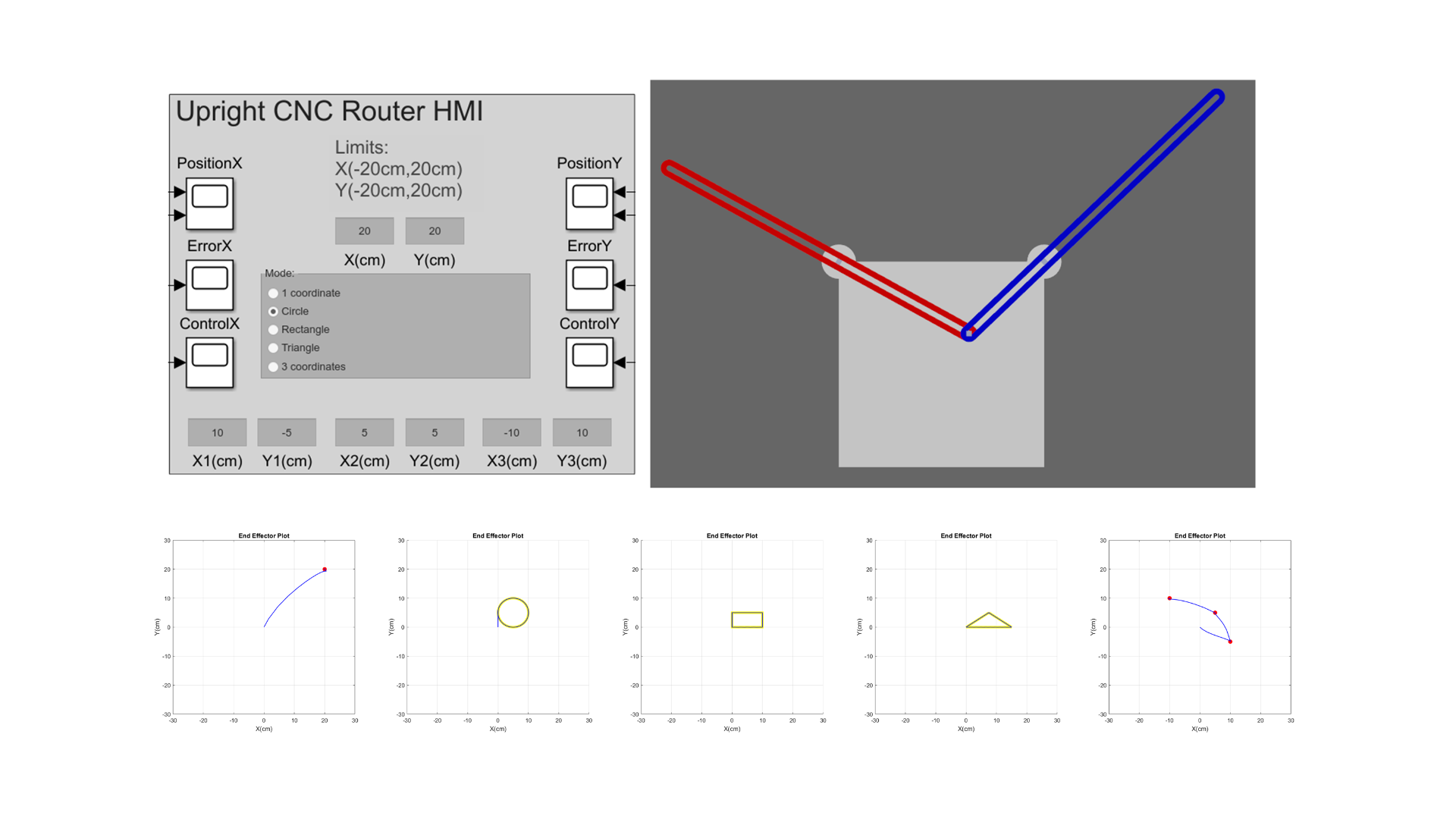
Programmed the control system of a simulated Upright CNC Router with Simulink in MATLAB, achieving the drawing of 3 basic shapes and the trajectory between 3 input coordinates.
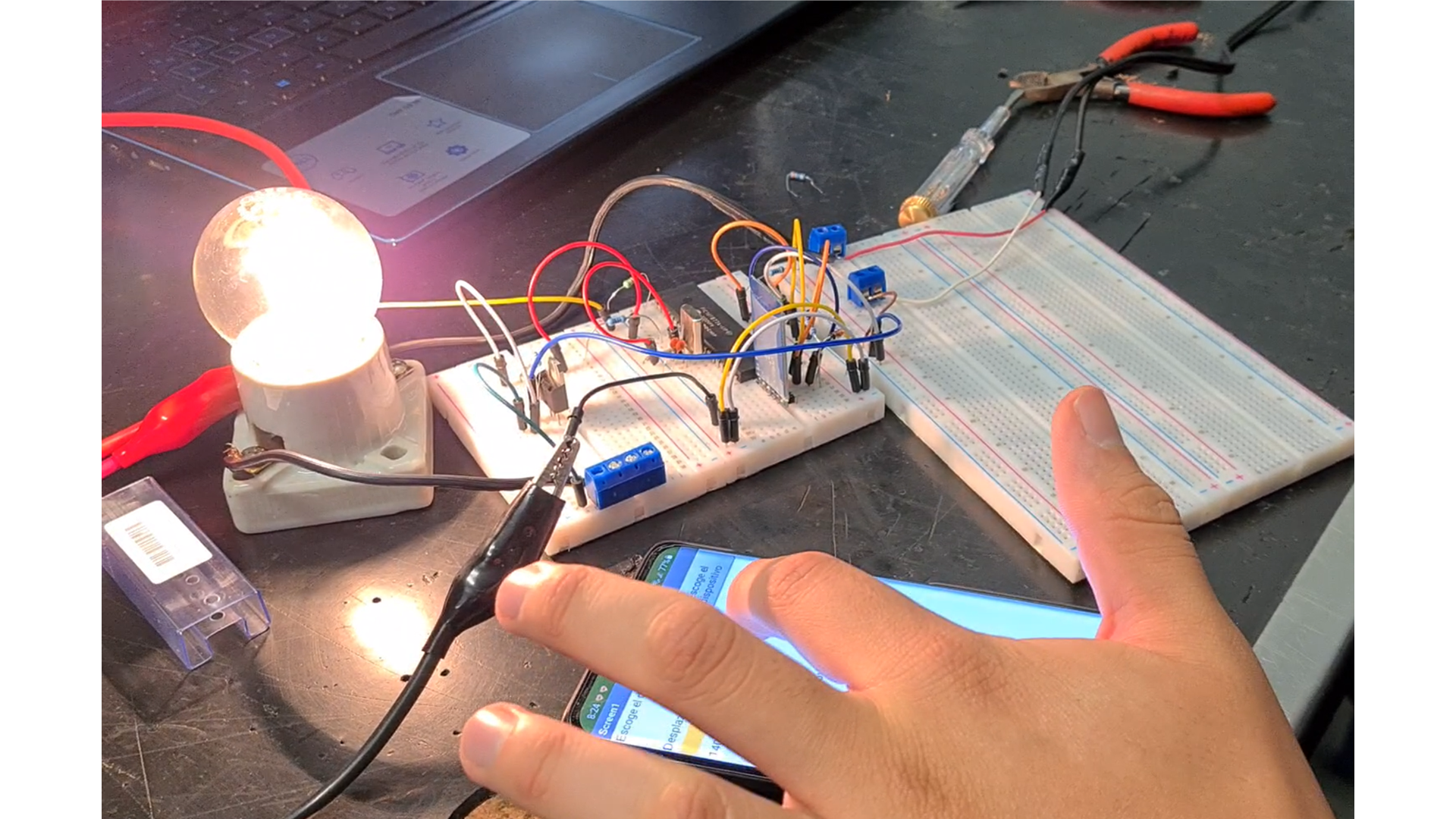
Developed a smart bulb by creating an app with MIT App Inventor with a scroll bar to regulate via Bluetooth the intensity of a bulb in an electronic circuit controlled by a PIC16F877A microcontroller.

Programmed on Arduino a Sumo robot for international competition Robofest 2022 as a member of Robociety student association, successfully pushing 3 bottles off the table without falling.
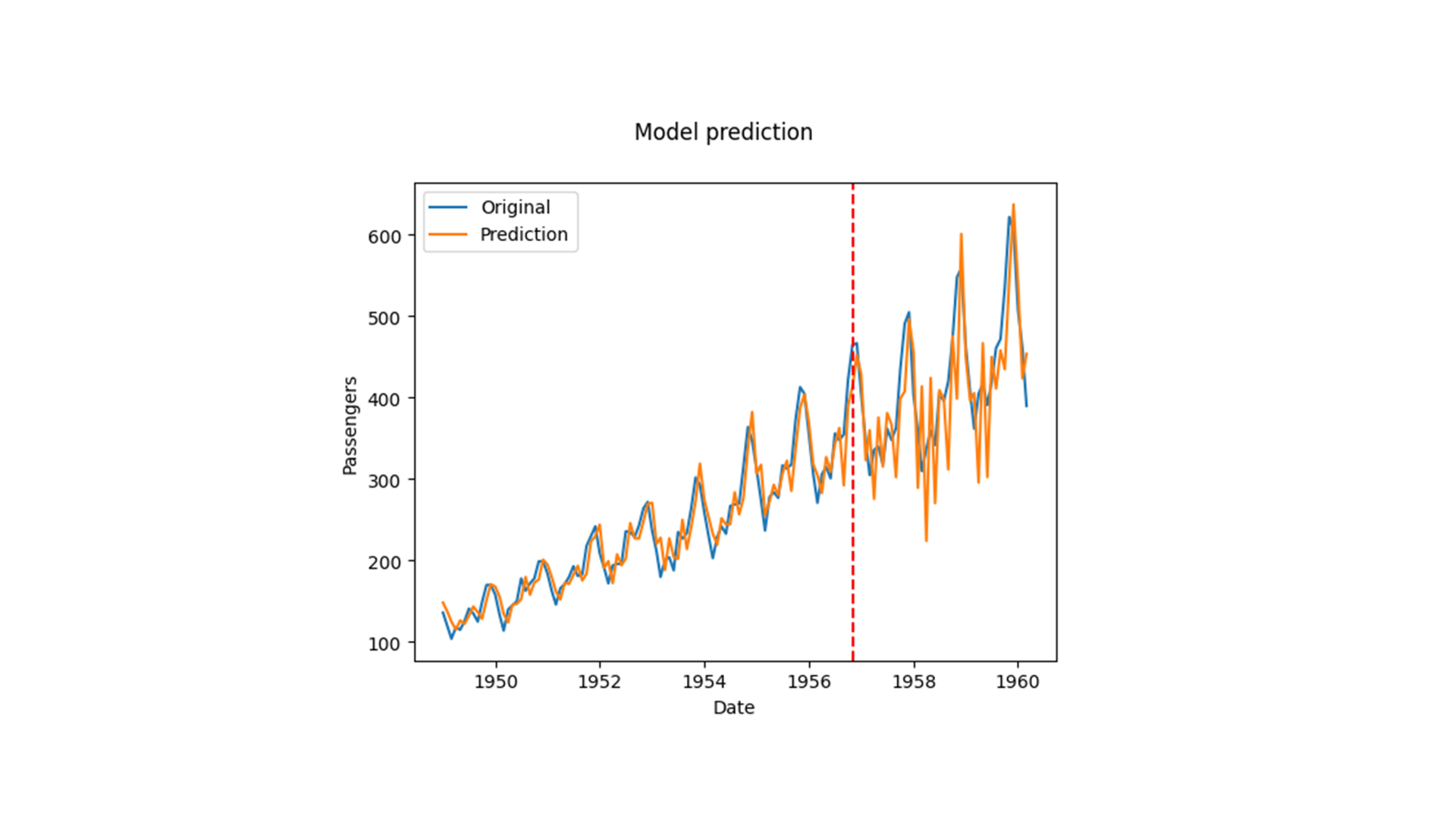
Coded on Python a LSTM model to predict the number of passengers per date of an airline company, having a loss of 0.00162 with a learning rate of 0.01 in 2000 epochs.

Contributed to the design and programming of a robotic gripper with Arduino, mounted on a UR10e robot successfully completing the tasks of collecting a tomato and placing it on a container.
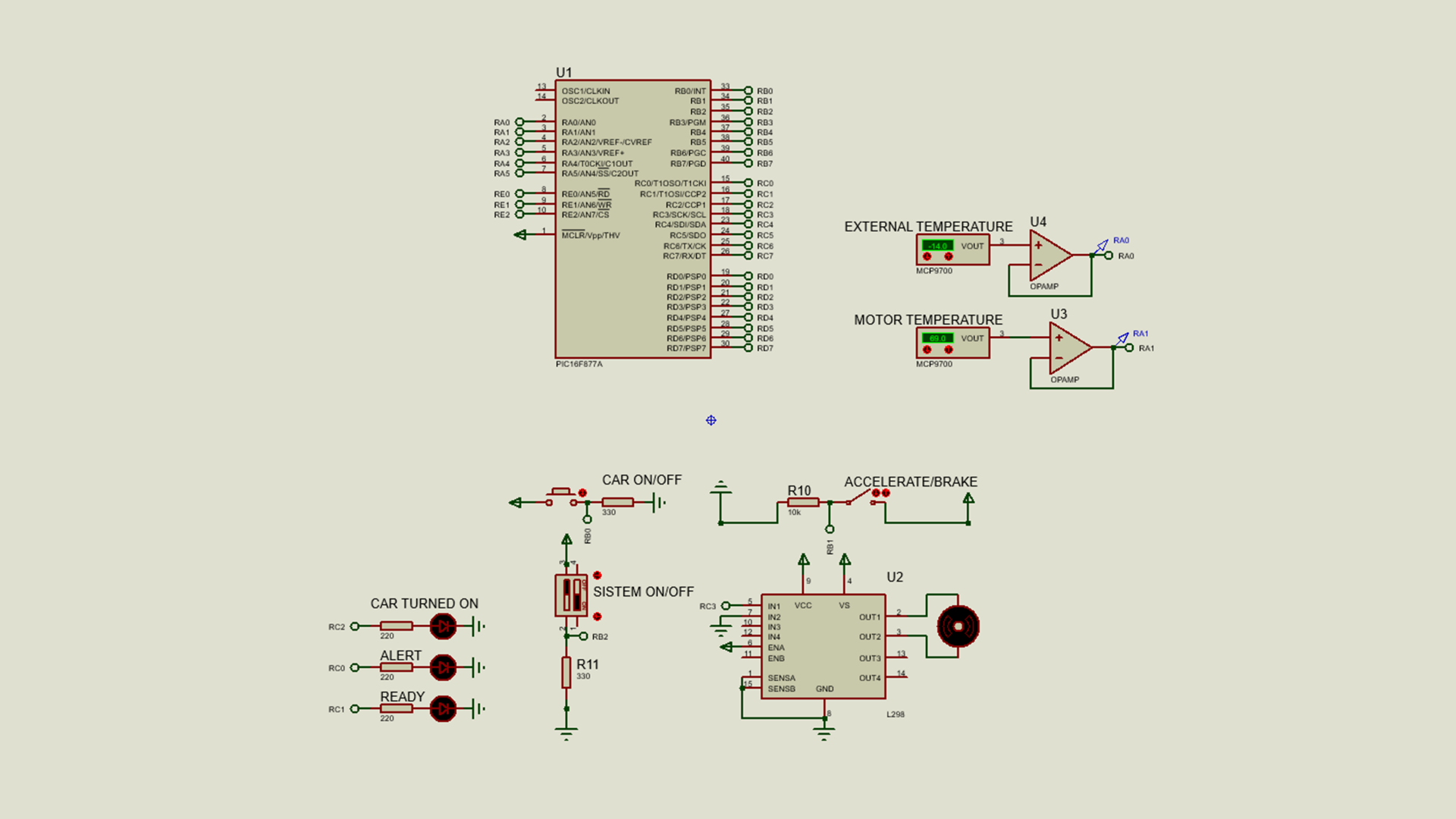
Programmed on C the Proteus circuit of a car motor system with MPLAB X IDE on a PIC16f877a microcontroller, controlling the motor behavior on 3 weather condition scenarios.
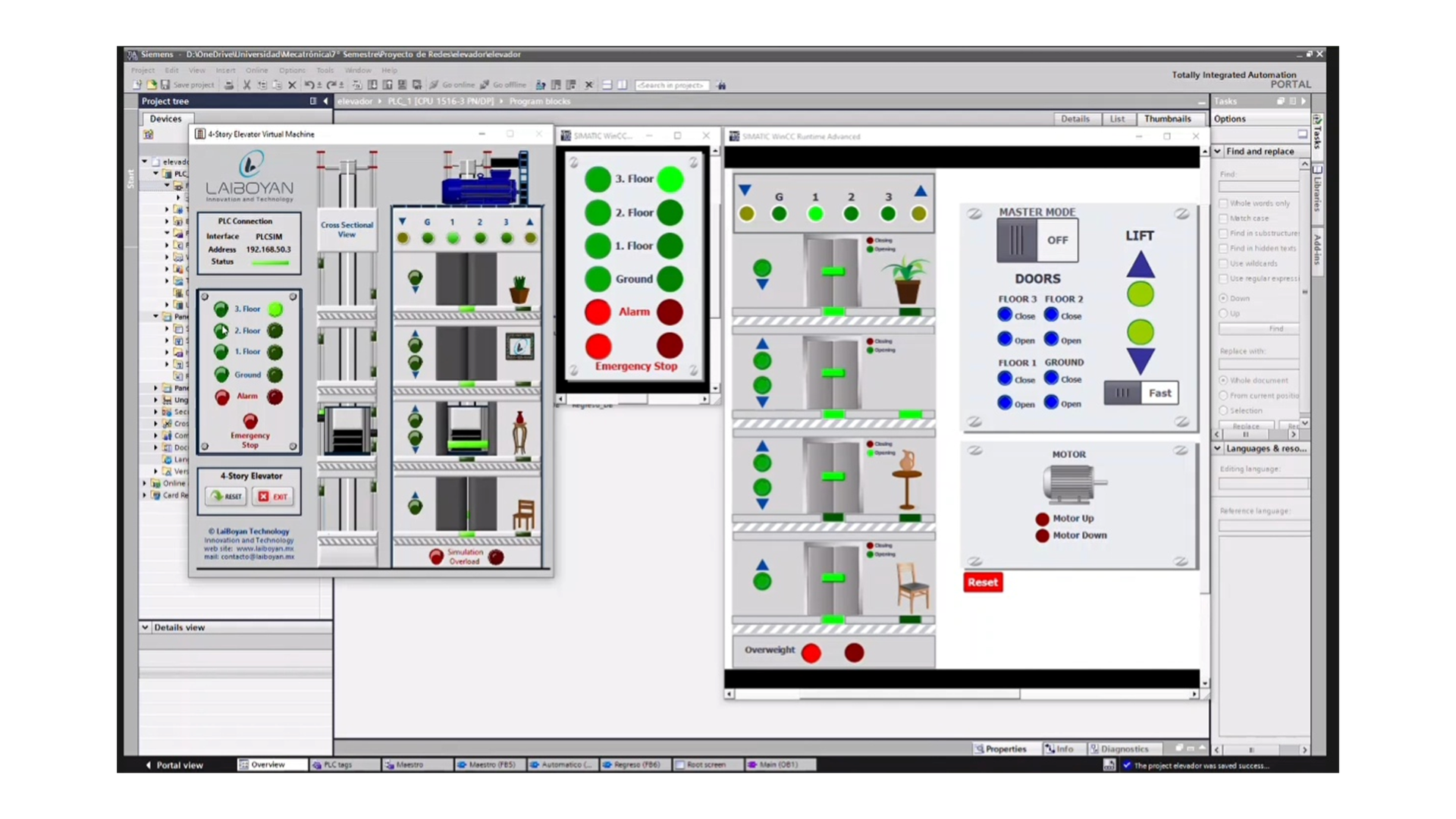
Programmed a simulated 4-floor elevator using SCL and ladder language on a PLC with TIA Portal, fulfilling tasks of a real elevator including weight limit, alarm, variable speed, pressing memory and an HMI.
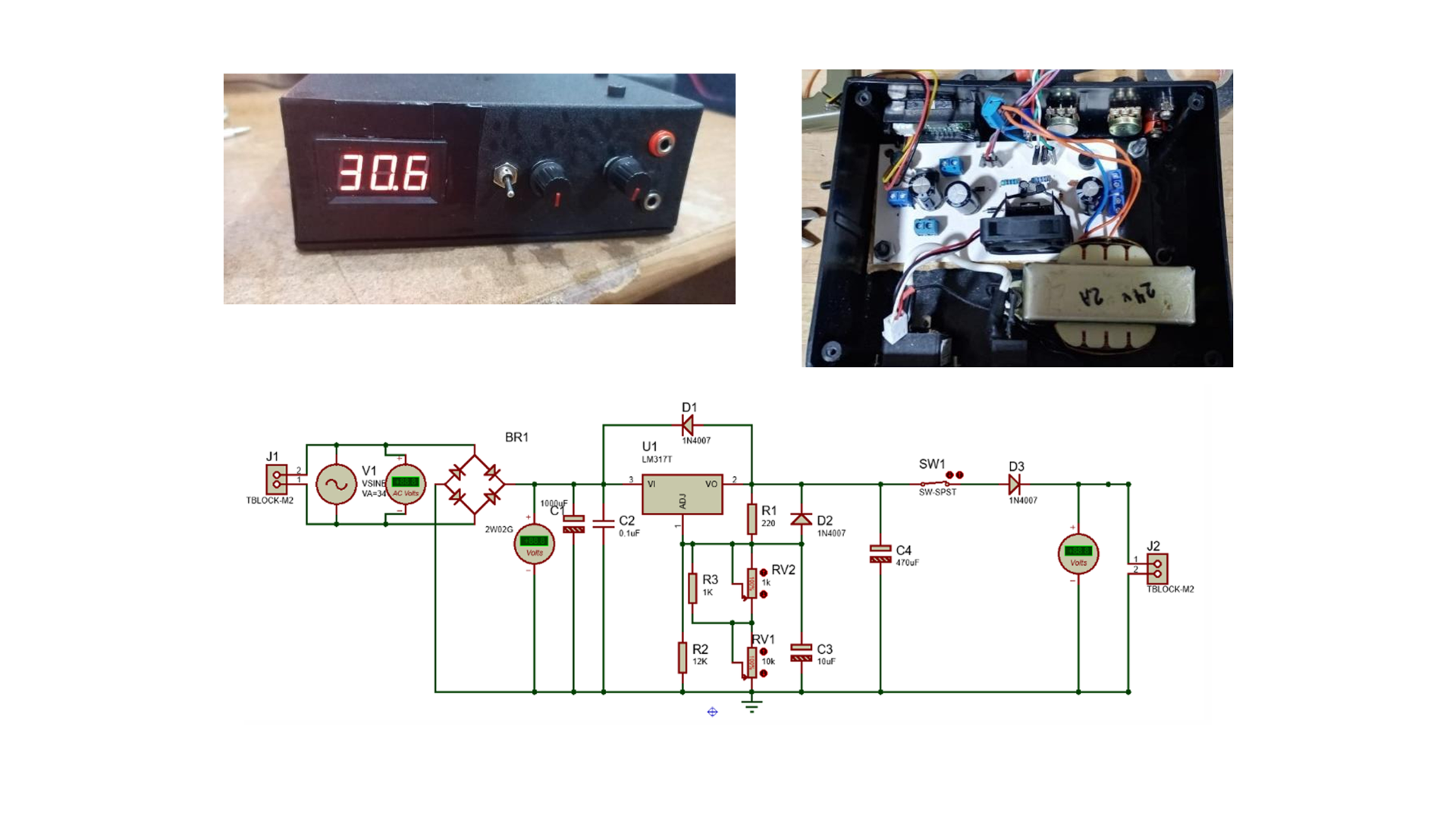
Contributed to the development of a power source with short circuit and overcurrent protection, giving outputs from 1.2 to 30.6 Volts. The simulation was made with Proteus, and a real prototype was built.
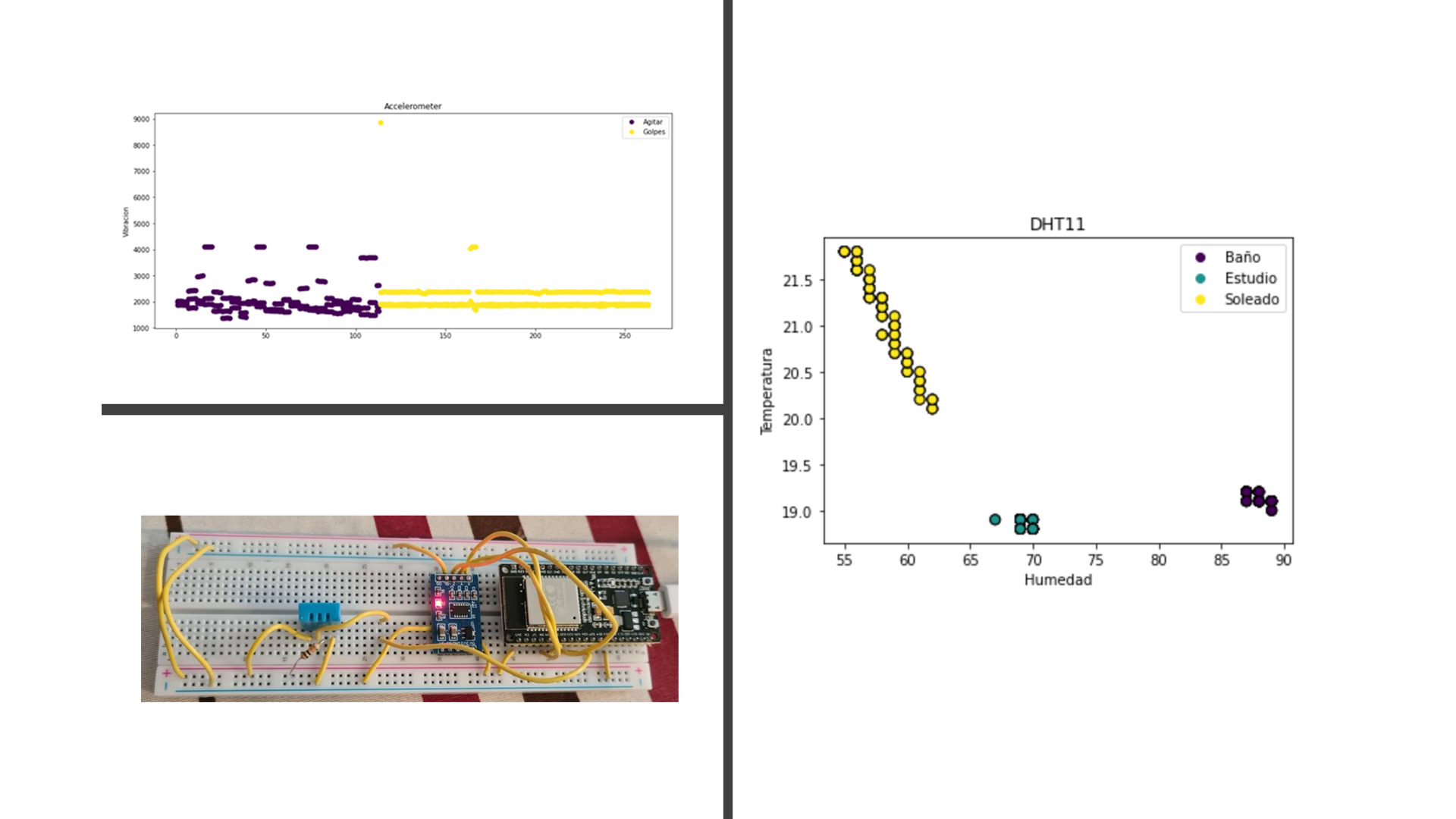
Implemented 2 machine learning algorithms (KNN and Decision tree) on Python with data from accelerometer and temperature sensors, with both accuracies higher than 97%.
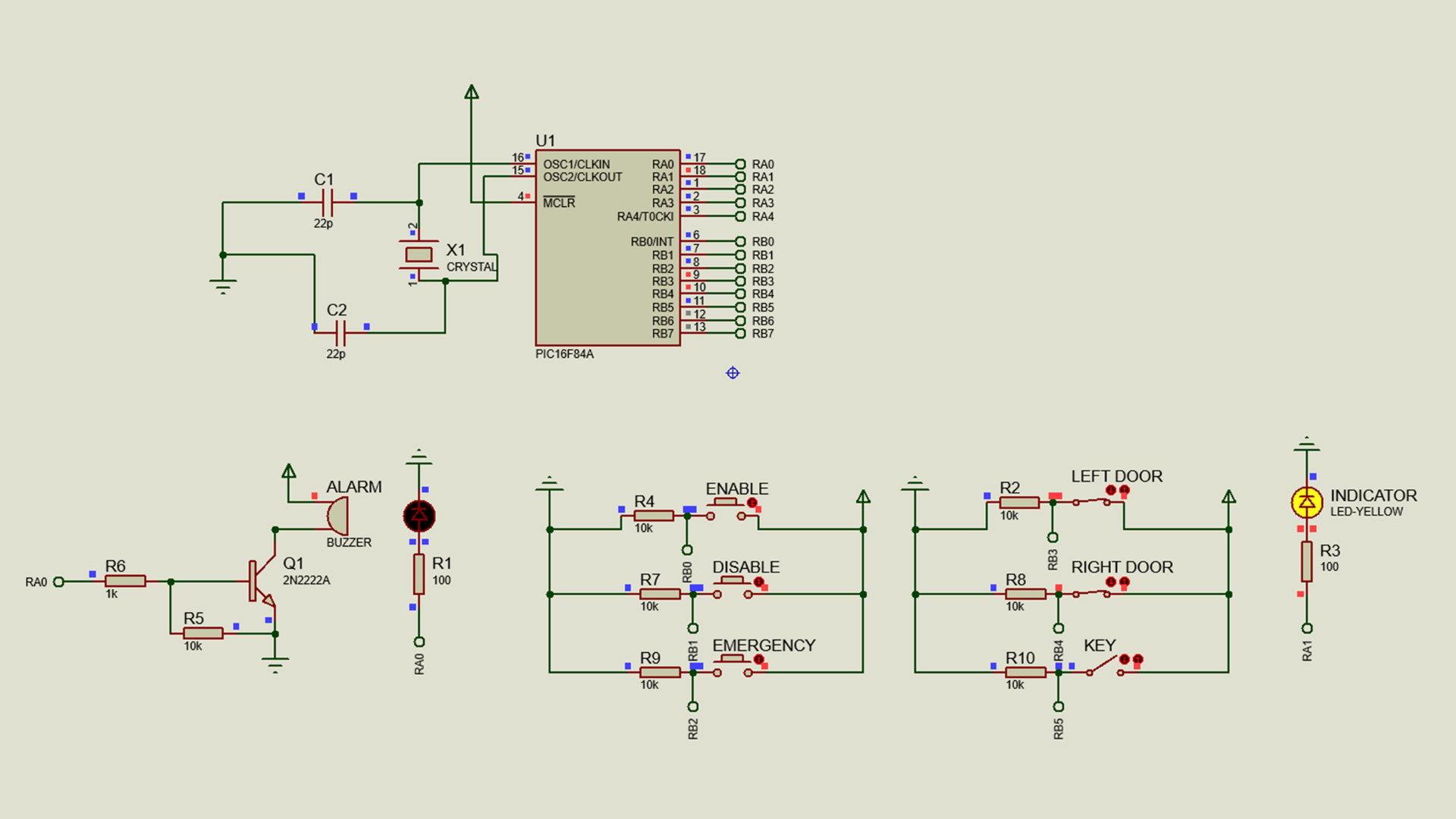
Programmed on assembly language the Proteus circuit of a car alarm system with MPLAB X IDE on a PIC16F84A microcontroller by simulating doors and key buttons, plus light and sound indicators.
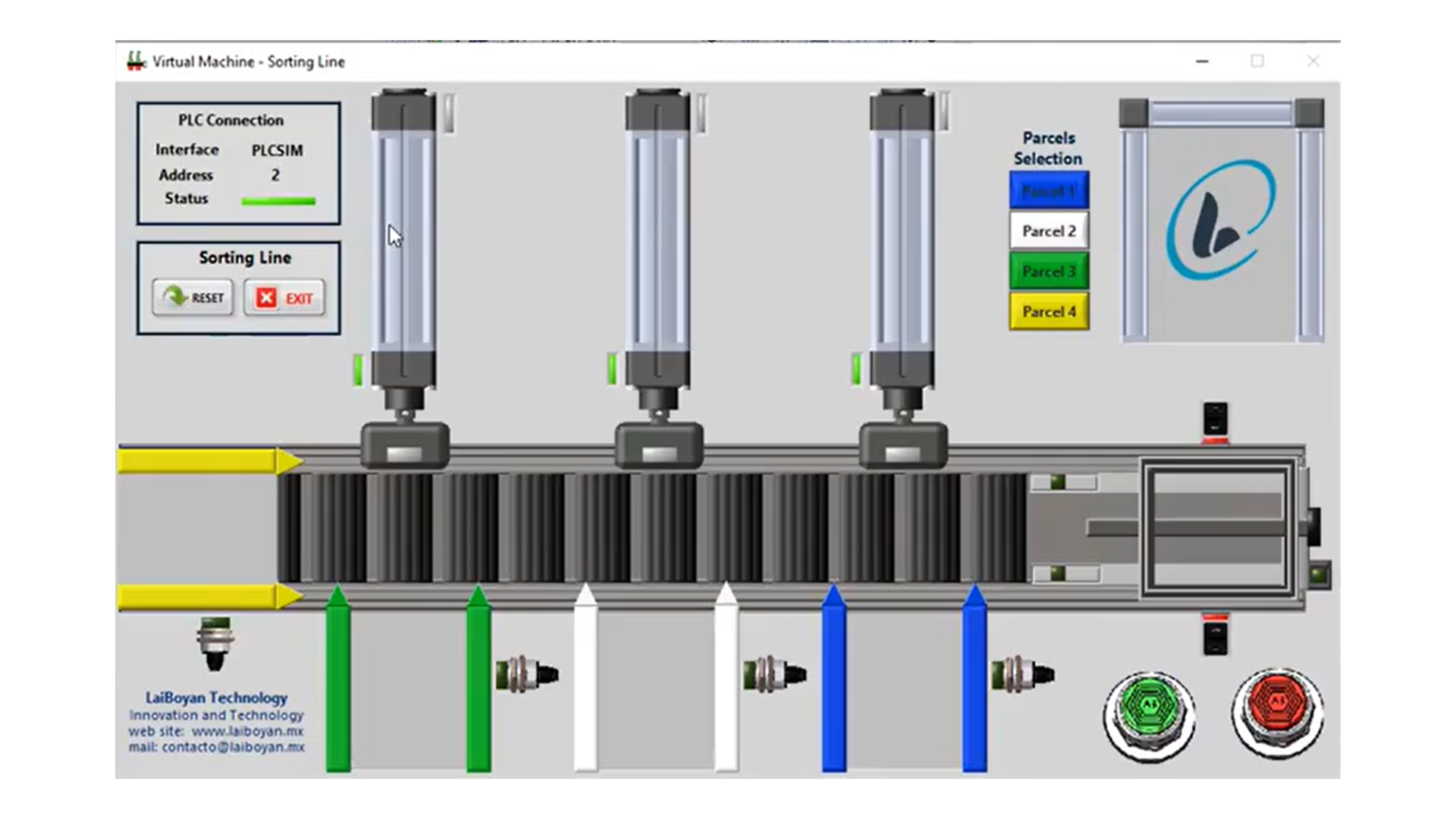
Programmed a simulated sorting line using ladder language on a PLC with TIA Portal, successfully sorting parcels from 4 different types using sensors and pistons without overfilling the containers.
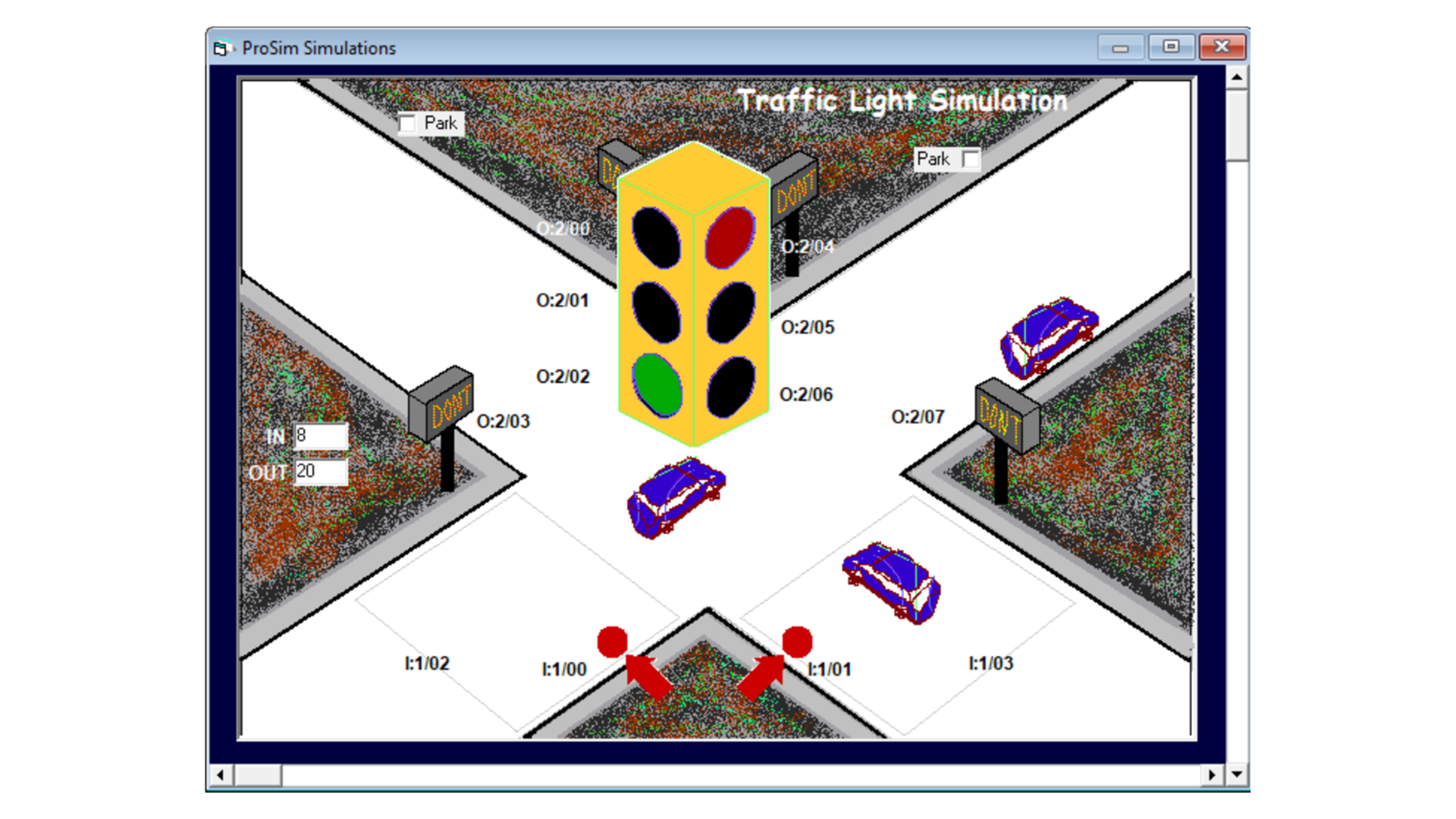
Programmed with ladder language the PLC of a LogixPro traffic light simulator, defining 70 and 30 seconds for green and yellow lights, plus 100 seconds when using the crosswalk button.
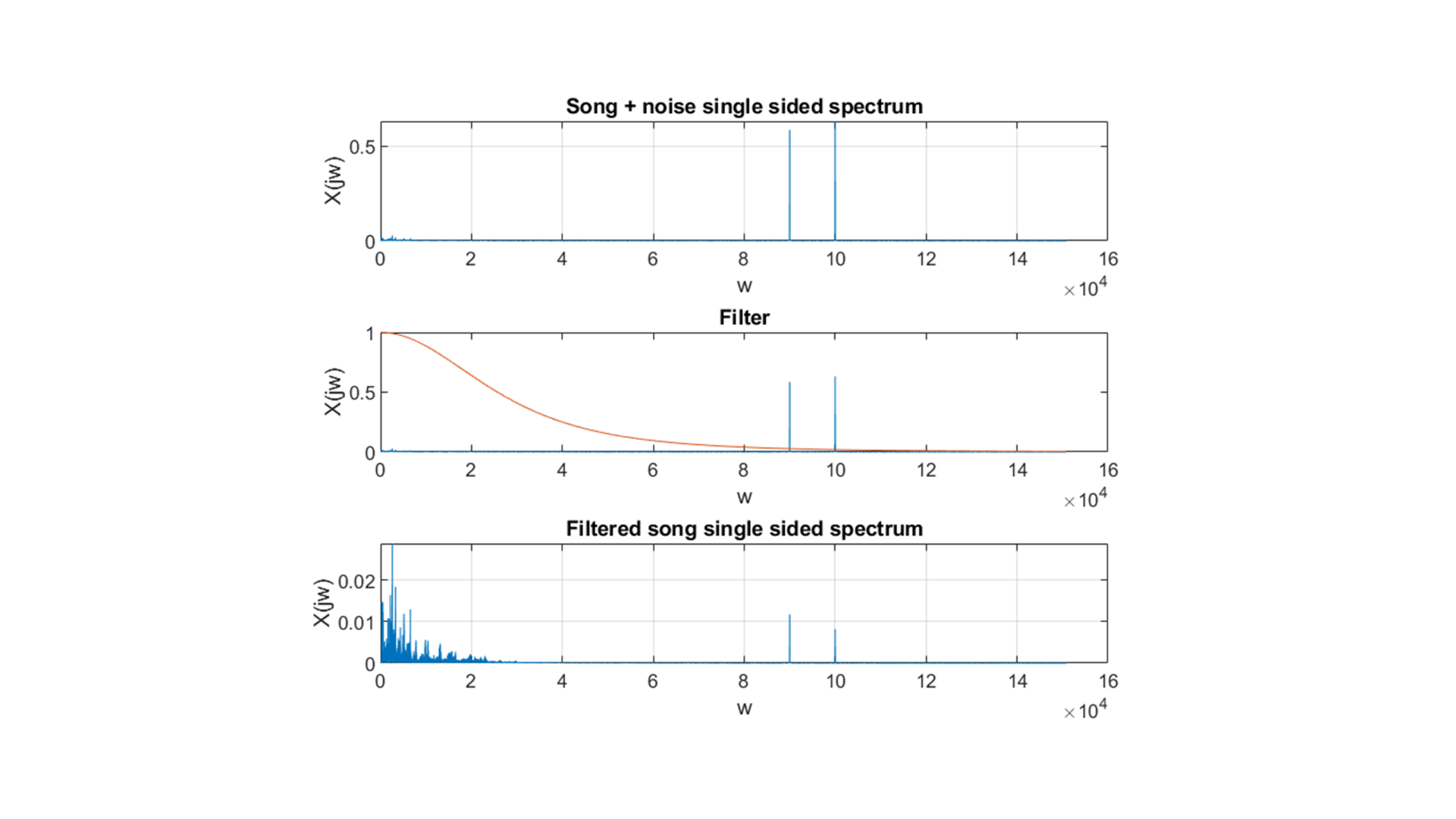
Programmed on MATLAB an audio filtering system that took a piece of a song and added high frequency noise to then filter it using a low-pass filter to return to the original song.
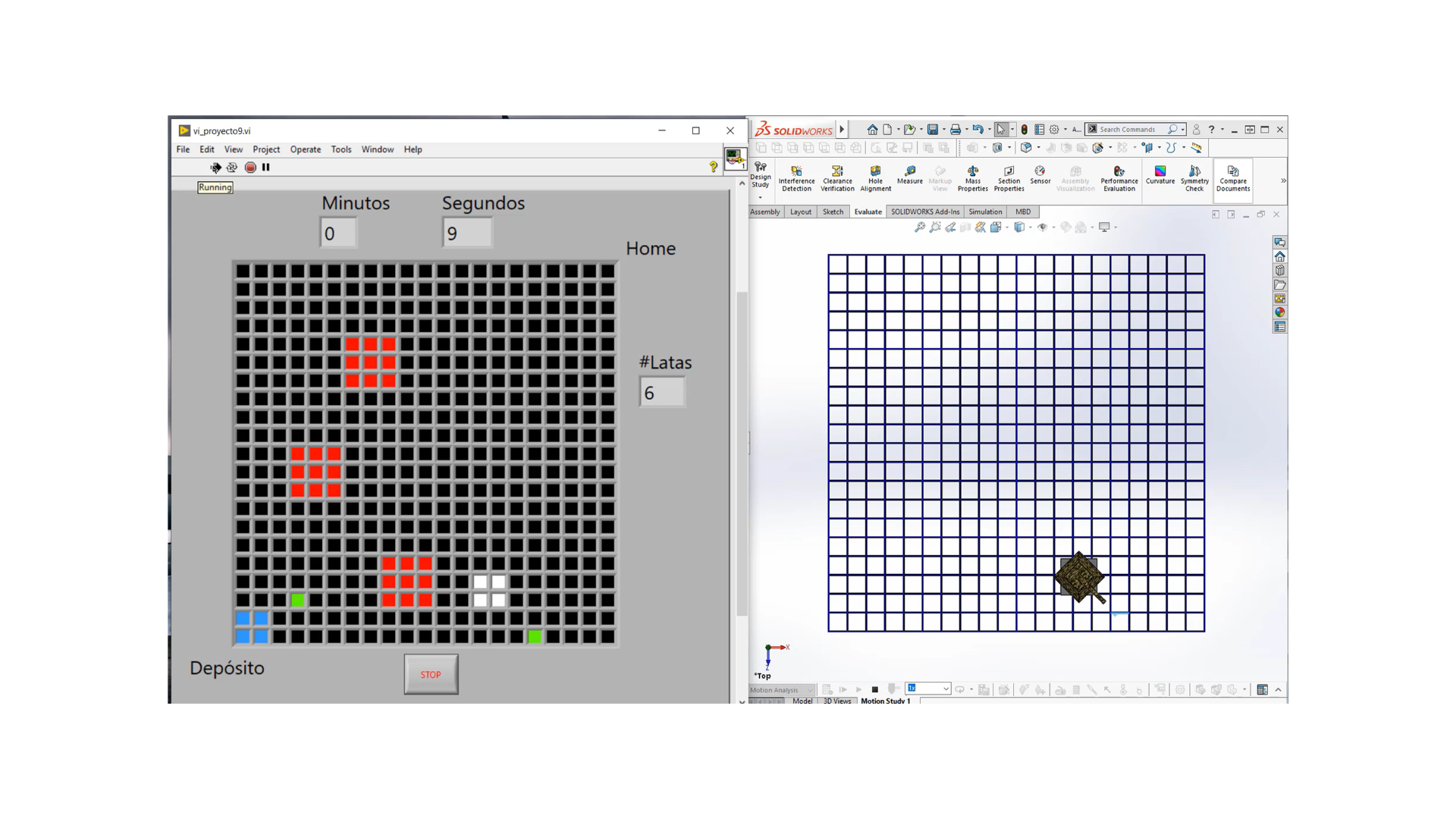
Programmed a simulated robot on LabVIEW that was able to collect 8 cans and place them all on a container at the finish line within 4 minutes while avoiding 3 obstacles.
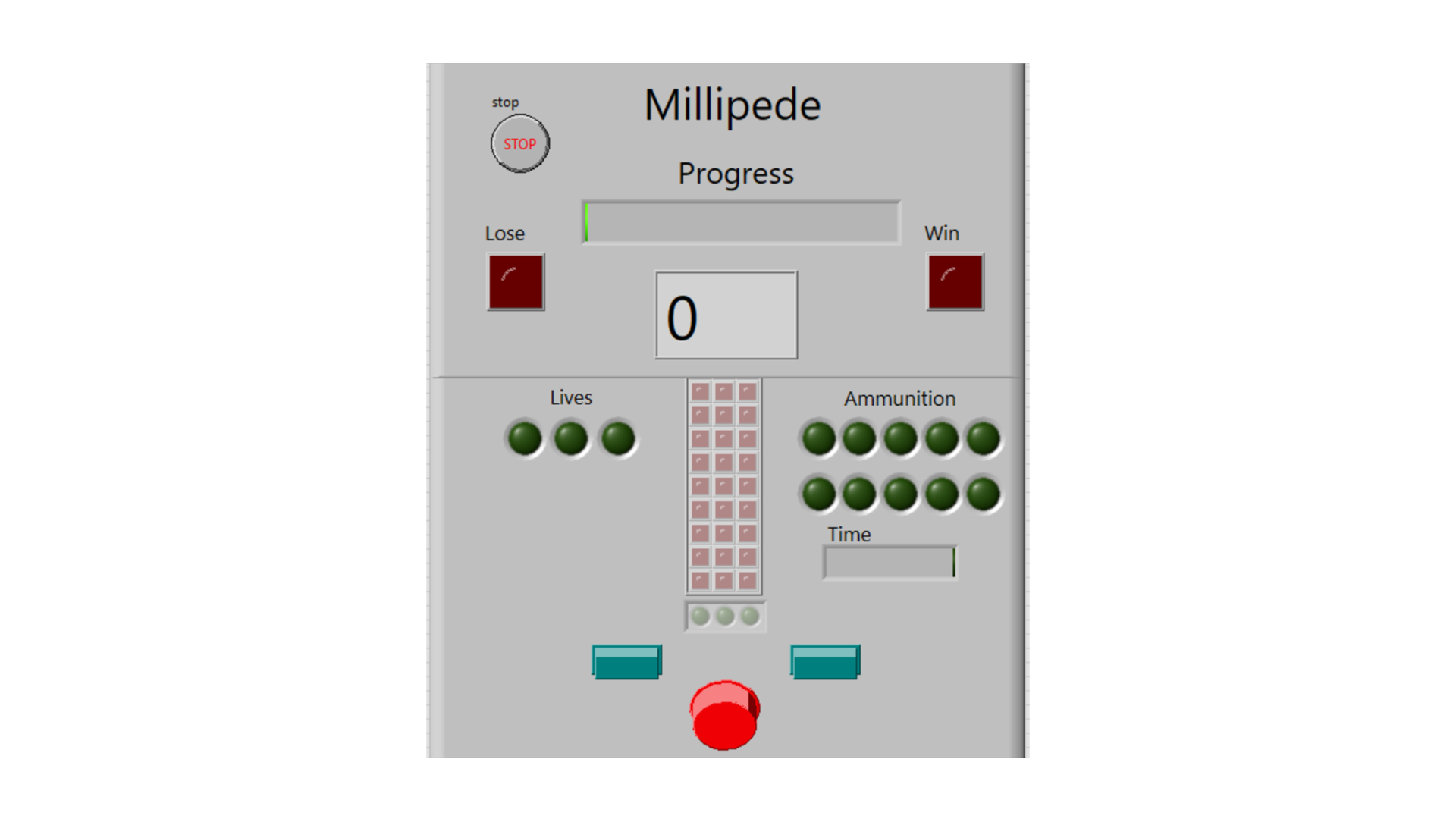
Programmed on LabVIEW a video game similar to Millipede from Atari, with the goal of surviving through 20 levels of 5 seconds each, with 10 ammunition and 3 lives.
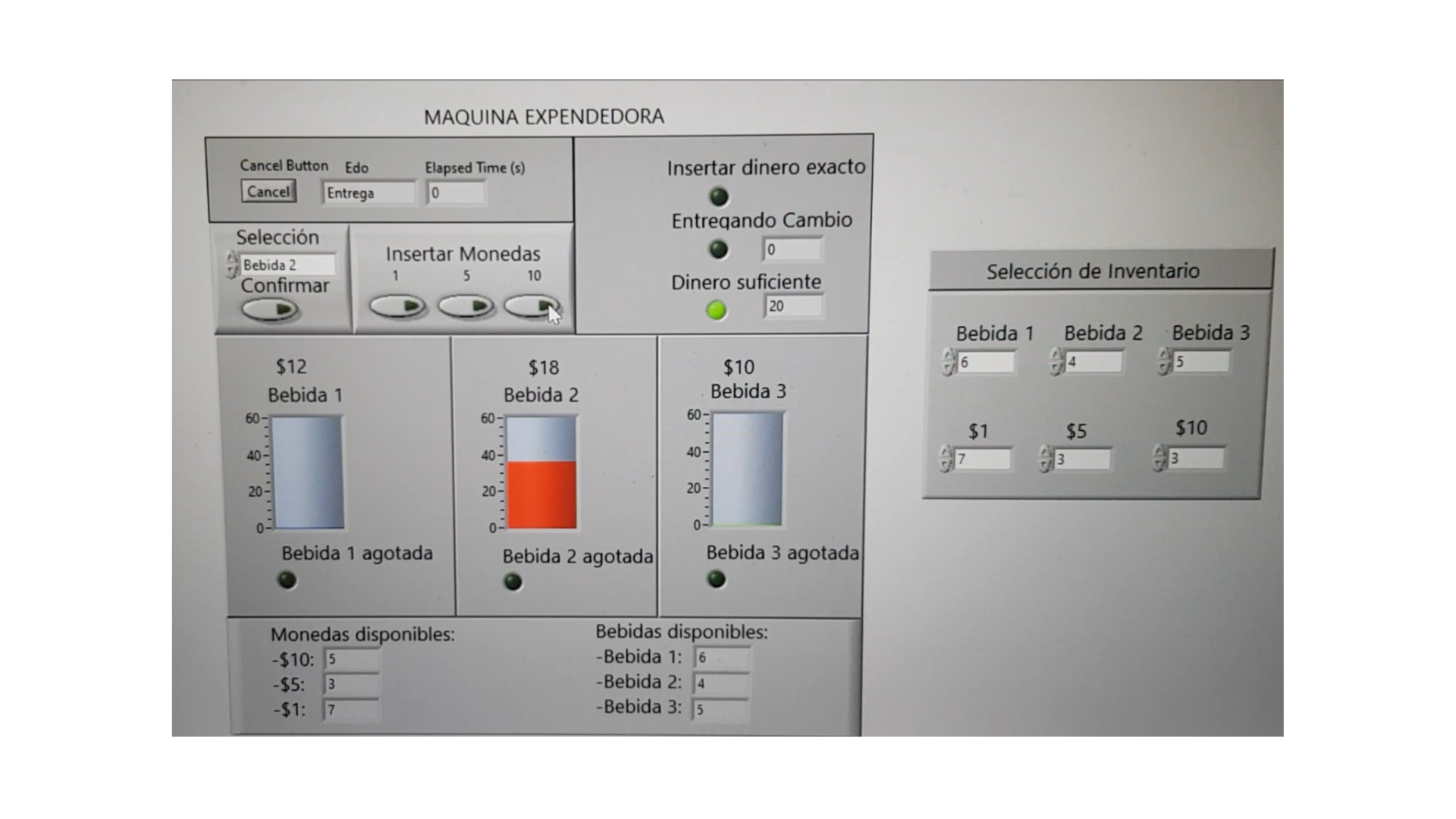
Programmed a simulated vending machine on LabVIEW, capable of serving 3 drinks while counting coins and available drinks to assure both change and dispensing availability.
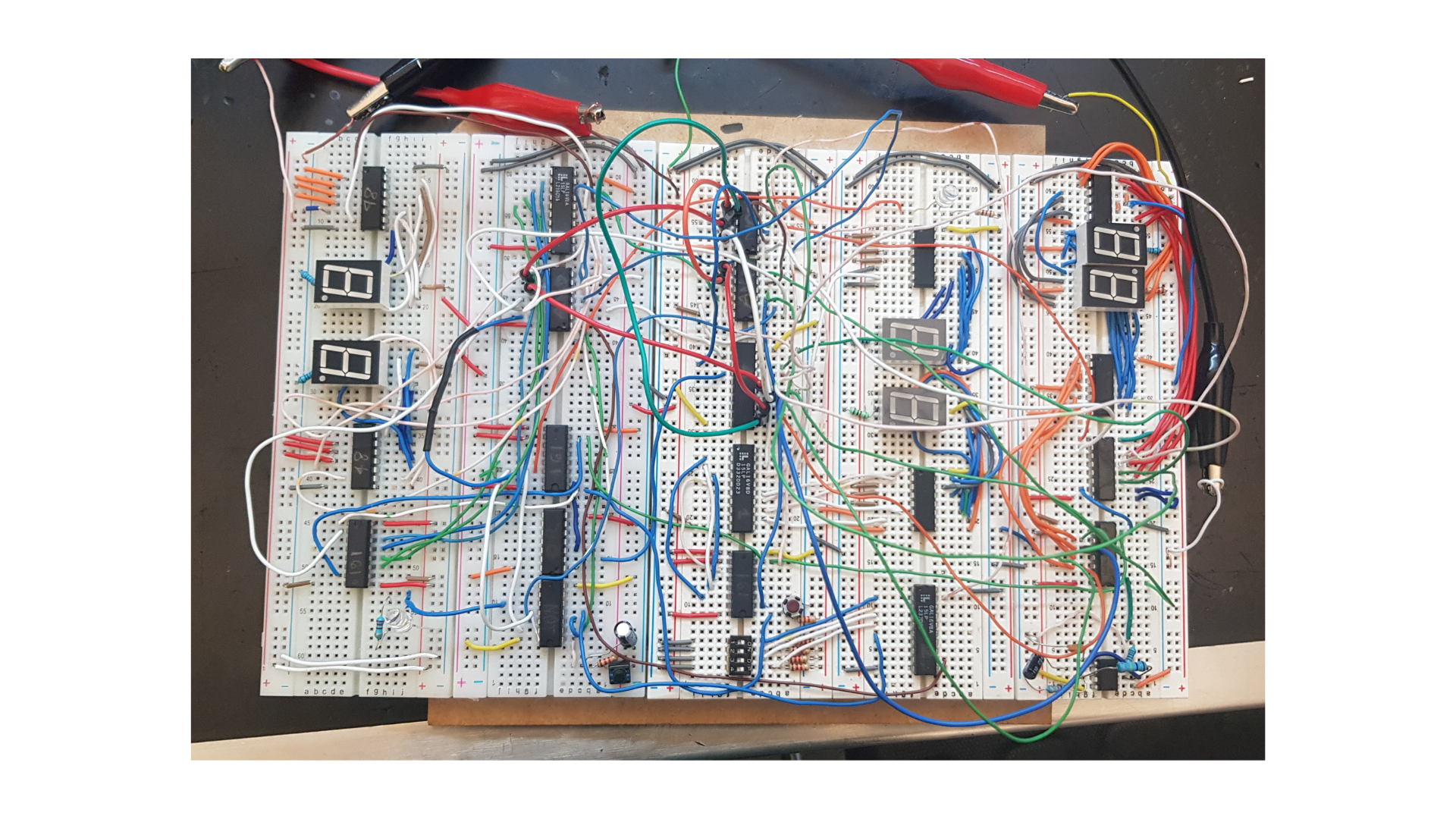
Contributed to the design of an electronic circuit for a multiplayer basketball game with GAL16V8 PALs programmed with CUPL, 74161 binary counters and 7448 decoders for seven-segment displays.
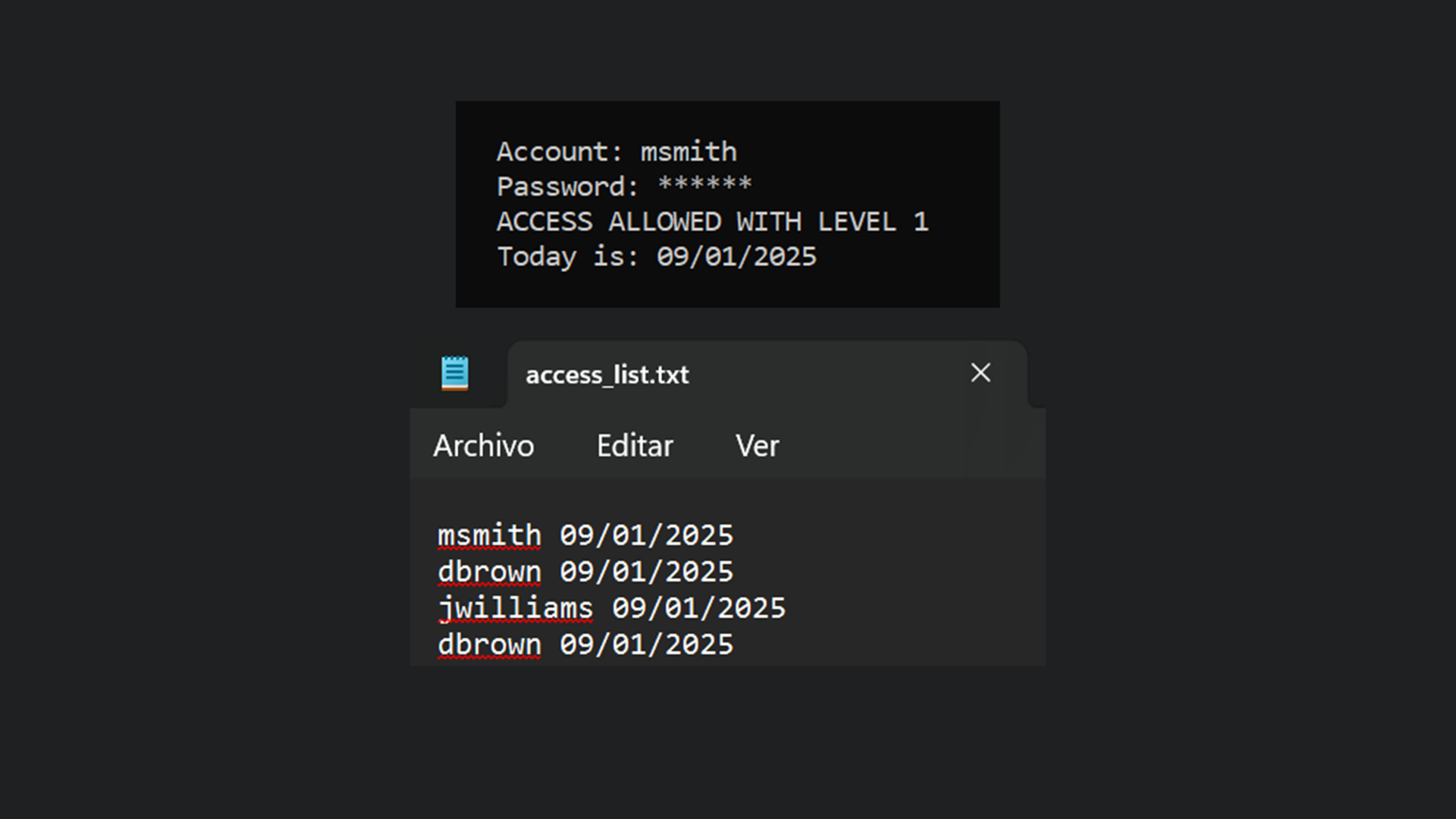
Coded with C++ a router access validation program, where users get an assigned access level if their account and password match the database, plus also adding their connection date into an access list file.
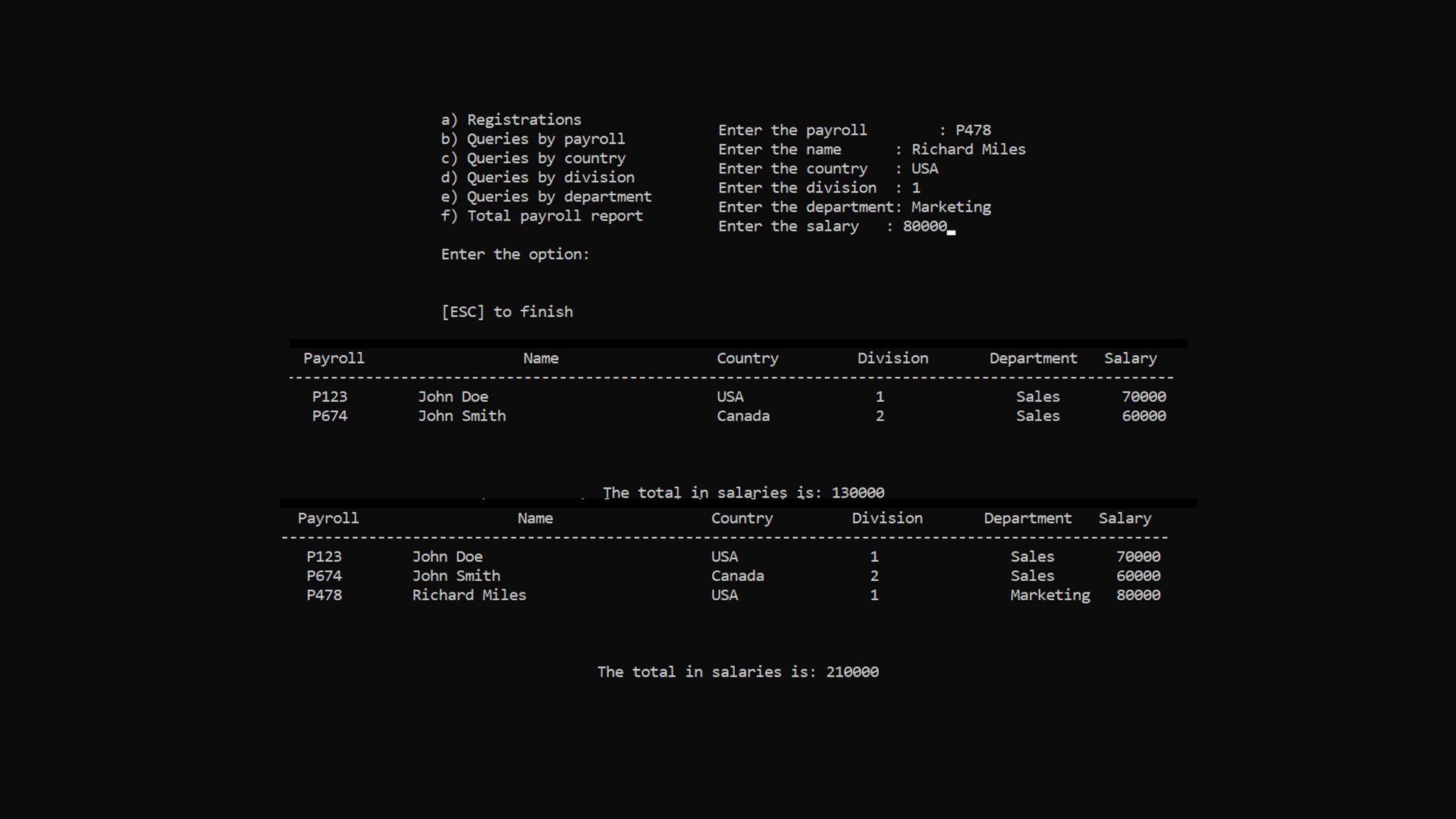
Coded with C++ a program that makes payroll registrations on a text file database and makes salary queries by payroll, country, division and department plus a complete report with all entries.
Programmed with C++ a two-player battleship game that requested both boards as text files and displayed them on an executable file, asking for both players’ moves and showing the final result.
This Q1 journal article presents the tuning and comparison of various optimization algorithms on the Next Best View (NBV) problem. A simulated 5 Degree-of-Freedom (DOF) mobile robot with a mounted simulated range sensor was used on a Virtual Reality Modeling Language (VRML) environment, and the space discretization was made using a voxel map. The optimization methods tested were Nelder-Mead, an Evolution Strategy, and Simulated Annealing. Their repeatability was tested on a laboratory model, a room with a cube and a pyramid inside it, and a study room with multiple furniture and windows.
This master’s thesis describes the impact of the objective function and optimization methods on the Next Best View problem, which consists in finding the next position that the sensor or camera needs to take to scan an object or scenery in its totality. A multi-factor objective function was designed including area and motion factors. Global optimization tasks such as a backstepping technique to escape local minima and a dynamic change in the objective function were implemented. Optimization methods such as Nelder-Mead, an Evolution Strategy, and Simulated Annealing were tuned and compared on three different scenarios.

 Feb 2023 - Dec 2024 M.S. in EngineeringGPA: 99.2/100 (Mexican system, equivalent to approx. 3.97/4.0)Taken Courses:
| ||||||||||||||||||||
|
Aug 2018 - Dec 2022 B.S. in Mechatronics EngineeringGPA: 98.7/100 (Mexican system, equivalent to approx. 3.95/4.0)Taken Courses:
Extracurricular Activities:
|
The TOEFL iBT test measures a test taker’s ability to combine listening, reading, speaking and writing skills where it matters most — in the classroom. It gives your institution access to millions of students who have proven they have what it takes to succeed in an English-speaking academic environment.
A Machine Learning Engineer designs, builds, productionizes, optimizes, operates, and maintains ML systems. This learning path guides you through a curated collection of on-demand courses, labs, and skill badges that provide you with real-world, hands-on experience using Google Cloud technologies essential to the ML Engineer role.
This specialization develops strong programming fundamentals for learners who want to solve complex problems by writing computer programs. Through four courses, you will learn to develop algorithms in a systematic way and read and write the C code to implement them. This will prepare you to pursue a career in software development or other computational fields.
The CSWA (Certified SOLIDWORKS Associate) is designed for users new to the software and has completed a beginner course. This associate level certification proves your fundamental knowledge and basic skills in the software and is suitable for those starting their career or transitioning into a new domain.
C1 Advanced, formerly known as Cambridge English: Advanced (CAE), is one of our Cambridge English Qualifications. It is the in-depth, high-level qualification that shows you have the language skills that employers and universities are looking for.




